一、六機器人智能焊接站
(一)整體概述:
1、總體概述:
本六機器人協同作業實驗平台,可開展智能無程式碼編程、數碼孿生、通感算一體化等智能制造核心技術的研究測試,進行包括基礎硬件系統、電氣控制系統、上位機控制系統等在內的設計、部署與安裝偵錯,並以本平台為測試載體,進一步研發建設自動化、資訊化、數碼化生產示範單元,充分培養資訊科技、電氣工程、電子技術、生產管理、工業工程以及其他相關專業的綜合實踐套用和科研創新能力。

GLGY-01型六機器人焊接工作站
2、基本描述:
①本器材作為多機器人協同作業的實驗測試平台,以典型的多機器人聯動焊接工作站為落地套用物件,使實驗平台上的測試研究成果具備可移植性和可復制性;
②測試平台具備完善的安全防護裝置;
③本平台基於友好的操作維修便利性考慮,整體操作及使用符合人體工程學,便於操作、拆裝和維修,最大程度的降低作業時勞動強度;
④本 器材外觀、管路線美觀、整潔,器材各部件維修便利,各器材內元器件標識齊全清晰,采用PVC或鋁制標牌;
⑤ 電、氣路連線采用快插形式,接頭可靠耐用;
⑥器材固定穩定可靠,器材正常工作時不會出現明顯晃動的情況;
⑦本器材包含專案所必須的軟硬件及相關的安調服務,具備一定的可延伸性,後續可新增器材且不影響整體實驗平台的穩定使用。
(二)系統組成:

(三)技術參數:
1、平台可適應典型工件尺寸;
2、軌跡精度:輸出的機器人軌跡程式可直接用於焊接作業;
3、機器人焊接單元能自動即時起弧、送絲、焊接、熄弧的全過程;
4、六機器人協同作業,軌跡之間不發生幹涉;
5、機器人具體參數
① 負載:12kg -20kg;
② 最大臂展半徑:1.65m -1.85m;
③ 軸數:6軸;
④ 重復定位精度:優於0.05mm;
⑤ 防護等級:不低IP67;
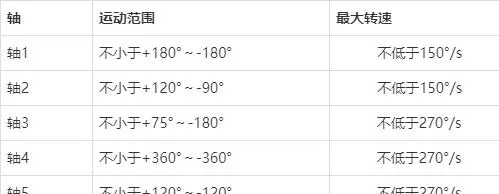
⑥各軸運動範圍及最大轉速:
⑦電源:3相380V(+15%, -10%),50/60Hz;
⑧機器人自重:≤360kg;
⑨適應最大濕度:95%;
⑩ 適應環境溫度:5 ° C-45 ° C;
⑪控制櫃形式:緊湊型;
⑫控制硬件:多處理器系統、PCI 總線、大容量快閃記憶體、停電備用電源、USB儲存介面;
⑬控制軟件:成熟可靠的即時OS、高級RAPID程式語言、PC-DOS文本格式、預裝軟件、另提供DVD版本、擴充套件功能組;
⑭電源:380V,50/60Hz;
⑮環境溫度:5 ° C-45 ° C;
⑯最大濕度:95%;
⑰防護等級:不低於IP54;
⑱操作面板:控制櫃上;
⑲示教器:彩色圖形界面輕觸式熒幕、操縱桿和緊急停機,左右手操作支持,USB記憶體支持;
⑳維護 :狀態LED指示燈,診斷軟件,恢復程式,登陸時間標記功能,預留遠端服務功能 。
6、焊接系統參數:
①全數碼化控制的逆變電源;由微電腦芯片控制和監測焊接數據和焊接過程;
②可透過電腦載入軟件擴充套件器材功能;可套用於碳鋼、鍍鋅板、薄板不銹鋼的焊接;
③ 器材有直流MIG/MAG焊、MIG釬焊功能 ;
④適應碳鋼和不銹鋼焊接的各種要求,焊機有三種標準的焊接程式,即打底焊程式、強力電弧程式,以及標準直流焊接程式。顯示面板設計科學合理,透過一元化調節方式,方便操作員使用;
⑤器材具有溫控風扇冷卻,以節約能源和超溫自動保護功能;
⑥ 有JOB工作方式(記憶),可儲存5組焊接程式 ;
⑦具備 數碼顯示:焊接電流、焊接電壓、弧長、送絲速度、電感、JOB記憶序號 ; 焊接結束時螢幕「HOLD」保持著焊接參數實際值 ;
⑧ 送絲機為4輪送絲 ;
⑨焊機故障報警顯示及保護功能,提供過壓、欠壓、缺相、過溫及焊機內部故障原因和部位等報警;
⑩冷卻水箱帶有水流量和溫度傳感報警開關;
⑪中繼線由於冷卻水箱的和訊號傳輸衰減原因,配備最長合適長度為20米;
⑫具有數碼訊號介面透過總線式通訊,可方便的配合全自動化控制的焊接和機器人的焊接。
7、機器人外部軌域及柔性工作台:
① 共兩套機器人軌域,單套機器人軌域上安裝3套滑台 ;
② 每套滑台額定承載1 T,滑台上安裝機器人本體、焊機及其它必要的器材;
③ 滑台軌域有效行程12m,滑台工作移動速度≥1m/s,加速度≥1.2 m/s²,重復定位精度≤±0.05mm ;
④驅動方式:外部軸電機;
⑤執行穩定可靠,齒輪、齒條具有防塵、防焊渣等防護功能,配備限位開關和機械限位,操作部位充分考慮操作安全,不會發生傷人事件;
⑥結構描述
Ⅰ.軌域底座設計合理,結構強度可靠,執行穩定,在廠房或教室地面安裝牢固,地腳安裝位置預埋鋼板,我公司提供詳細的預埋施工圖紙;
Ⅱ.設定機械限位支架及機械零點插銷,避免超程,並能夠快速校正零點;
Ⅲ.滑台設定防撞行程開關:
❶避免外側兩個滑台超程,萬一發生超程情況,先觸發行程開關,後到達機械限位;
❷避免滑台之間發生碰撞,滑台之間安裝限位緩衝區,萬一行程開關失靈,由緩衝區避免碰撞損壞;
❸行程開關電氣參數:端子型接線、無源觸點常開、常閉輸出,不需供電。
Ⅳ.整體采用全密封式設計,密封罩拆裝方便;
Ⅴ.電機、減速機拆裝方便,便於維修;
Ⅵ.采用集中自動潤滑,潤滑油集中回收,不會出現潤滑油亂流汙染現場的情況 ;潤滑系統的控制訊號采用PNP型 ;
Ⅶ.機器人安裝座的孔位按照機器人廠商 官方底座圖紙設計,配φ35mm定位銷套 ;
Ⅷ. 軌域設定水平方向、豎直方向可調節地腳,安裝時保證直線滑軌、齒條的直線度、平行度,最終保證重復定位精度≤±0.05mm ;
Ⅸ.現場走線、橋架布置等不會出現影響站內焊絲更換通道的情況。
8、安全系統描述:
①執行穩定可靠,齒輪、齒條帶有防塵、防焊渣等防護功能,配備限位開關和機械限位,操作部位充分考慮操作安全,不會發生傷人事件;
②在保證器材正常運轉的情況下,我們增加了安全標識指示。
9、多機協同控制系統功能描述:
①機器人執行安全控制:配備了必要的安全控制配套,如急停、安全繼電器、安全門、安全光柵等,實作手、自動工作狀態下整個系統的安全執行,緊急情況安全停機;
② 六機協同控制:實作6台機器人同時啟動共同作業 的功能,具體包括機器人的執行時序控制、機器人安全作業區域協同控制等內容;
③無線通訊模組;
④機器人運動軌跡視覺化模組;
⑤機器人幹涉預判:多機協同工作狀態下設定安全區,根據運動軌跡規劃結果預判幹涉碰撞發生的可能性,自動確定機器人之間的避讓策略。
二、智能無程式碼編程傳感控制系統
(一)器材整體參數:
1、總體概述:
為提高柔性制造過程的智能化加工和現代化管理水平,本器材以六機器人協同作業實驗平台為載體,研發建設智能無程式碼敏捷編程傳感控制系統,進行包括移動式傳感控制一體機、無線便攜式傳感控制器、無線智能觸控式光筆、軌跡規劃模組等在內的設計、開發、部署與測試,以該平台為測試載體,與後續更多的擴充套件性智能技術結合,進一步研發建設自動化、資訊化、數碼化生產示範單元,充分培養資訊科技、電氣工程、電子技術、生產管理、工業工程以及其他相關專業的綜合實踐套用和科研創新能力。
2、基本參數:
①本器材為多機器人協同作業實驗平台提供智能無程式碼敏捷編程系統,以客車頂蓋焊接典型工件為例,使該系統的研究成果具備向工業現場推廣套用的基礎;
②傳感控制系統具有操作簡便、易用的特點,符合人體工程學,最大程度的降低作業時勞動強度;
③ 器材外觀、管路線美觀、整潔,器材各部件維修便利,各器材內元器件標識齊全清晰,采用PVC或鋁制標牌;
④電、氣路連線采用快插形式,接頭可靠耐用;
⑤無線通訊模組可適應工業生產現場的電磁幹擾環境;
⑥器材固定穩定可靠,器材正常工作時不會出現明顯晃動的情況;
⑦本器材包含專案所必須的軟硬件及相關的安調服務,適應實驗平台的電氣系統和控制系統,具備可延伸性,後續可新增器材且不影響整體實驗平台的穩定使用。
(二)系統構成:

(三)技術參數:
1、視覺傳感單元
①視覺傳感空間分辨率為0.1mm;
② 影像分辨率不小於2592×2048pixels ;
③ 視野範圍不小於3 ;
④ 最佳工作距離1.5m -1m;
⑤ 景深800mm -1000mm;
⑥ 自動升降高度1.8m -3.3m;
⑦在 正確安裝鏡頭以及線纜的情況下,IP防護等級不低於IP30;
⑧ 工作溫度0℃ -50℃。
2、通訊計算單元
① 通訊計算綜合時延低於50ms;
②數據儲存空間為512GB;
③中央處理器:6核;
④軌跡自主規劃計算模組;
⑤WIFI 5 (802.11ac 2x2);
⑥ 藍芽5.0通訊模組 。
3、移動式智能無程式碼編程傳感控制一體機參數
①器材使用效率:
Ⅰ.工作站復用的部署時間為從器材在站邊開始架設到開始編程的用時為15min以內,單人操作;
Ⅱ. 器材總編程效率平均1.5min/條焊縫,單人操作 (包含一次示教編程時間,超差焊縫精調時間及空走驗證時間。一次輸出程式的焊縫軌跡精度不低於目標值,不滿足直接焊接的部份焊縫軌跡,可以透過快速精調功能,調整至滿足焊接精度要求,整體時間控制在總編程節拍時間內);
②幹涉避讓:所生成的機械臂運動程式,不會與周邊夾鉗、定位塊及框架等發生碰撞,機器人之間、機器人與導軌滑台之間不會發生碰撞。
③過程控制互動:對於多機站,幹涉區互鎖邏輯與現場工作站相容,自動生成程式的樣版中已做好幹涉區互動設定。
④工藝參數互動
Ⅰ. 焊接工藝參數設定:在示教過程中快速設定焊接參數、擺動參數(藍芽模組上不低於5組可選),可透過控制器滑鼠鍵盤或輕觸式熒幕配合光筆實作,方便易操作,單條焊縫參數設定時間不 會 超過5秒;
Ⅱ. 焊接順序及程式可讀性:操作人員根據現場標示的焊接順序進行編程示教,生成的每一個焊縫的焊接指令自動加編號註釋(如1、2、3……等),焊縫指令編號與示教順序一一對應,便於後續人工修改調整;新生成的程式工件座標系與現有舊程式的工件座標系相容,確保後續手工局部修正點位時便於人工操作。
⑤快速精調功能
對於批次軌跡超差焊縫,透過包角的快速精調功能進行焊縫長度的校準,直觀,快捷。可透過工控機或者平板電腦等來實作快速微調功能,可不依賴機器人示教器。
⑥一體機系統(含視覺系統、整體支架結構、工控機、顯視器、線纜)設計描述:
Ⅰ. 系統設計輕量化,一體機在水泥地面人工推動的勻速推動力不超過30N,最終 設計以滿足方便人工推動使用為準;
Ⅱ.使用電纜為高柔電纜或電纜備件;
Ⅲ.包含輕觸式熒幕高度等設計以方便操作人員站立使用為準;
Ⅳ.設計叉車叉運機構;
Ⅴ.設計器材不使用時的防護方案;
⑦其它參數:
Ⅰ.自動生成的焊接軌跡可避免機器人在焊接時其附帶的氣管電纜等過度纏繞,可確保各個關節無接近極限位置角度,機器人姿態平順;
Ⅱ.編程軟件具備賬戶登入及編程數據記錄功能,可匯出編程記錄,記錄內容包括:編程賬戶、程式名稱、編程時間等,記錄儲存時間高於3年;
Ⅲ. 機器人器材使用過程TCP焊槍發生偏移後,只透過校準焊槍本身TCP的簡單校準操作(如6點法)後就可具備光筆編程器材的繼續使用 ,光筆編程器材不會因此再進行額外復雜的操作,影響器材使用效率。
4、無線便攜式智能無程式碼編程視覺傳感器參數
① 總重量不超過5kg ;
② 具備快拆快裝機構,相容1/4英寸螺紋;
③Binning支持1×1,1×2,2×1,1×4,4×1,2×2,2×4,4×2,4×4;
④ 下采樣支持1×1,2×2 ;
⑤支持水平映像,垂直映像;
⑥ 數據介面Gigabit Ethernet(1000Mbit/s)相容Fast Ethernet(100Mbit/s) ;
⑦WIFI 5 (802.11ac 2x2);
⑧ 藍芽5.0通訊模組 ;
⑨ 數碼I/0 6-pin Hirose接頭提供供電和I/O:1路光耦隔離輸入(Lne0),1路光耦隔離輸出(Line1),1路雙向可配置非隔離I/0(Line2);
⑩電壓 範圍5 -15VDC,支持PoE供電。
5、無線智能觸控式光筆參數
① 可透過觸控UI實作工藝參數的選擇和示教點的刪減修改;
② 光筆指示燈顯示具備可見性、可達性;
③ 仿焊槍光筆設計小巧易用,方便操作工握持,具有良好的人機工程,重量≤0.5kg, 可減輕操作人員體力勞動強度;
④仿焊槍光筆可適應在各個焊縫位置示教的姿態和角度,保證可見性;
⑤仿焊槍光筆在正常使用時不需要校正,如出現意外磕碰、或者更換易損件後可在現場快速校正,如果出現嚴重的變形無法校準的情況,返廠校準即可。











