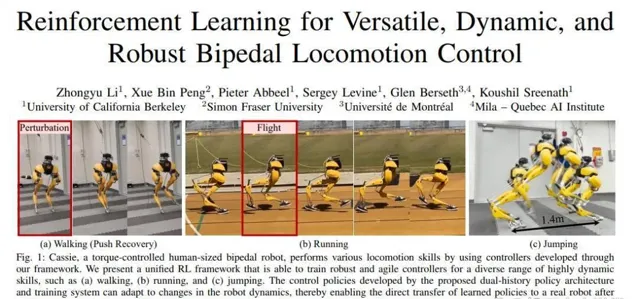
近日,一則關於雙足機器人 創造400米新紀錄 的訊息刷爆了科技圈。只見這個名叫Cassie的"機器人運動員",在聽到發令槍響的那一刻,就如離弦之箭般沖了出去。
它那"健步如飛"的身姿,靈活敏捷的動作,簡直令人瞠目結舌。因為此時的Cassie已經把人類跑步者遠遠甩在了身後。
終點線前的最後幾步,Cassie更是爆發出了驚人的能量,以一個漂亮的"沖刺"姿勢,一舉沖過了終點線,計時器最終定格在 2分34秒 !這個成績,甚至 超越了人類的平均水平 !
事實上,Cassie在這次創紀錄的表現中,展現出的是高達 每分鐘155.6米 的驚人步速。而就在兩年前,它在完成5公裏戶外長跑時,配速為 每分鐘94.3米 。
除了奔跑,Cassie的跳遠成績同樣亮眼。在沒有經過專項訓練的情況下,它跳出了 1.4米 的好成績!
▍揭秘Cassie的"超能力"
Cassie的驚艷表現,離不開其背後先進的技術支撐。那麽,是什麽讓Cassie如此與眾不同呢?
論文地址:https://arxiv.org/pdf/2401.16889.pdf
首先,Cassie擁有 獨特的機械結構設計 。它的腿部采用了類似於人類小腿和腳踝的設計,具有更大的關節活動範圍和柔韌性。這種仿生學設計使得Cassie能夠更自然、更靈活地進行各種運動。同時,Cassie的身體各部份也經過了精心的最佳化,實作了重量的最小化和強度的最大化,為其卓越的運動表現提供了硬件基礎。
其次,Cassie 搭載了大量的傳感器和計算器材 。它全身上下分布著各種類別的傳感器,如慣性測量單元(IMU)、關節角度傳感器、力傳感器等。這些傳感器即時收集Cassie運動過程中的各種數據,讓它能夠全面感知自己的狀態和周圍環境。同時,Cassie還搭載了高效能的嵌入式電腦,可以快速處理這些海量數據,並根據演算法即時生成運動控制指令。
然而,Cassie真正的"超能力"來自於其 革命性的運動控制演算法 。與傳統的機器人控制方法不同,Cassie采用了 基於深度強化學習(RL)的控制策略 。
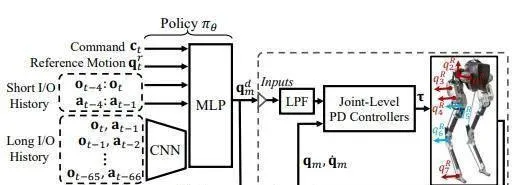
研究團隊開發了一種的創新控制器架構,稱為" 雙歷史架構 "。這個架構的獨特之處在於,它 同時利用了機器人長期和短期的輸入/輸出(I/O)歷史數據 。
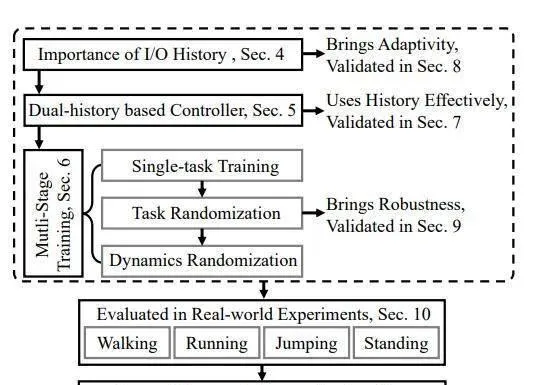
透過 端到端的強化學習方法 進行訓練後,這種控制架構在各種任務上,都展現出了優於其他方法的效能。此外,該RL系統還具備出色的 適應力和魯棒性 。
研究表明,透過有效利用機器人的I/O歷史記錄, 該架構能夠適應各種變化 ,如接觸事件等。
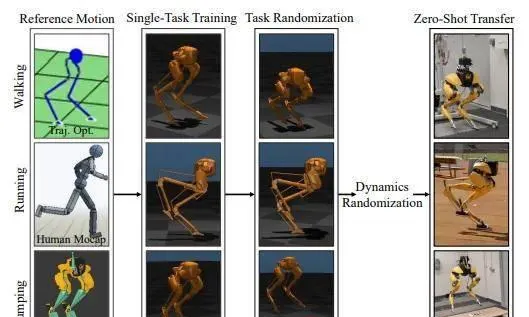
借助這個多階段的訓練框架,研究團隊成功獲得了一種通用的控制策略。這種策略能夠實作 零樣本遷移 ,直接套用於現實世界的機器人系統,而無需額外的調整或訓練。
同時,Cassie還具備 快速的反饋控制能力 ,可以根據實際狀態與期望狀態的偏差,迅速做出調整,確保運動的穩定性和精確性。
最後,Cassie的演算法還實作了 多技能的無縫切換和融合 。在實際套用中,Cassie需要在行走、奔跑、跳躍等各種技能之間靈活轉換。Cassie的控制系統可以實作不同技能之間的平滑過渡,並能夠在需要時進行技能融合(如在奔跑過程中進行跳躍),展現出更加靈活多變的運動能力。
▍Cassie的"訓練秘籍"
Cassie的成功還有賴於一套獨特的"訓練秘籍"。與人類運動員類似,Cassie也需要透過大量的訓練來提升自己的運動能力。但與人類不同的是,Cassie的訓練主要是在 虛擬環境 中進行的。
借助於強大的 電腦仿真技術 ,科研團隊為Cassie搭建了一個逼真的虛擬訓練場。在這個數碼世界裏,Cassie可以不受物理條件的限制,自由地嘗試各種運動策略和動作組合。透過不斷的試錯和最佳化,它逐步掌握了奔跑、跳躍等高難度技能。
更重要的是,在虛擬環境中,科研團隊可以為Cassie 設定各種復雜的場景和極端的條件 ,如不平整的地面、強風幹擾、意外障礙物等。透過在這些"噩夢"場景中的反復訓練,Cassie習得了超強的適應能力和魯棒性,能夠從容應對現實世界的各種挑戰。
Cassie基於RL的控制器架構如下圖:
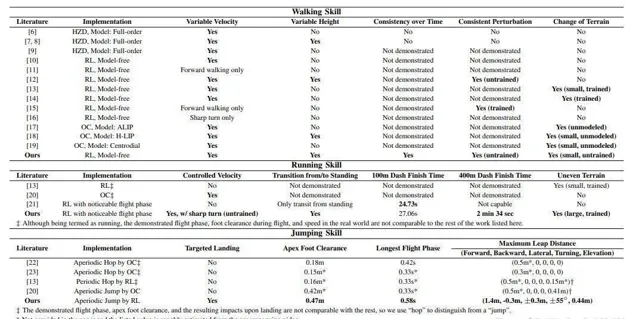
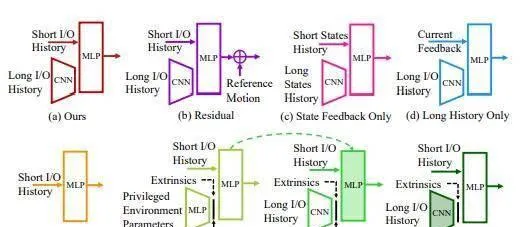
下圖是基於RL的Cassie運動控制策略架構各種基線的圖示:
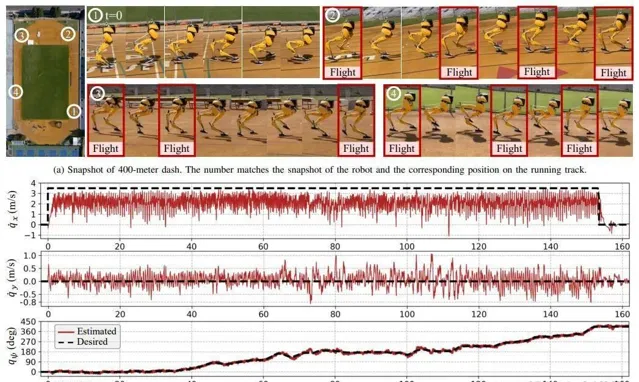
值得註意的是,Cassie利用了一種 單一的跑步策略 成功完成了此次400米沖刺。這個策略使得機器人能夠從靜止的站立姿勢,快速過渡到高速奔跑的步態。
在400米沖刺中,Cassie的平均速度達到了2.15米/秒,最高速度更是達到了驚人的3.54米/秒。
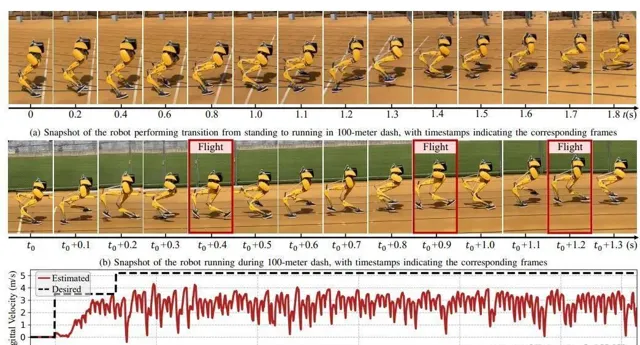
研究團隊在這個跑步策略的基礎上進行了微調,Cassie隨後又以同樣快速的跑步步態,完成了100米短跑的挑戰。
訓練的另一個秘訣,是科研團隊為Cassie量身客製的" 體能訓練計劃 "。透過對Cassie的機械結構和控制系統進行最佳化,團隊不斷提升其運動效率和耐力水平。同時,他們還開發了一套 即時監測系統 ,可以隨時掌握Cassie的"身體狀況",並根據反饋數據動態調整訓練強度和內容。
正是憑借這套獨特的"訓練秘籍",Cassie的運動能力才能在短時間內實作跨越式提升,最終創造出令世人矚目的佳績。而這,也為未來機器人運動能力的提升,提供了寶貴的經驗和啟示。
▍Cassie的意義與展望
從科研的角度來看,Cassie的成功開發標誌著動態雙足機器人技術的重大進展。長期以來,雙足機器人的穩定控制一直是一個巨大的挑戰。Cassie的出現,證明了透過先進的人工智能演算法,特別是 強化學習技術 ,我們能夠突破傳統控制方法的局限,實作高度動態和適應力的機器人運動控制。這為未來機器人技術的發展指明了方向,開辟了廣闊的前景。
從套用的角度來看,Cassie所展現的能力,讓我們對未來機器人的實際套用充滿了期待。想象一下,未來的機器人能夠像Cassie一樣靈活地在各種環境中運動, 那將會給我們的生活帶來怎樣的變革? 它們可以成為我們生活中的得力助手,無論是在家庭、辦公室,還是在戶外、工廠,都能提供無微不至的服務。它們還可以代替人類執行危險的任務,如搶險救災、探索未知環境等,為人類的安全和發展做出貢獻。
放眼未來,Cassie只是機器人技術發展長河中的一個縮影。隨著人工智能、材料科學、能源技術等領域的不斷進步,我們有理由相信,未來的機器人會變得更加智能、更加強大,它們將在更廣泛的領域發揮作用,與人類形成 更加緊密而協調的夥伴關系 。而Cassie,作為這一行程中的先行者和典範,必將在歷史上留下 濃墨重彩的一筆 。











