概述
一般情況下,機器人都具備本地啟動執行與外部啟動執行功能,ABB機器人也不例外。
透過在示教器上按「啟動」鍵來啟動ABB機器人自動執行的模式,我們可以稱為本地執行模式。相對的,透過外部訊號(如外接按鈕、PLC、HMI、PC等)來啟動機器人自動執行的模式稱為外部啟動執行模式。
ABB機器人外部啟動執行有多種實作方法,其中最為常用的是基於系統輸入輸出訊號的外部啟動執行方法。
系統輸入輸出是ABB機器人控制器中用於控制和反饋系統中某些特定功能的一系列I/O訊號介面,使用者可以將I/O訊號與之相關聯,以實作對機器人系統關鍵資訊的監視與控制。
機器人外部啟動工作流程
機器人外部啟動可以看作是本地啟動的擴充套件,它的啟動工作流程與本地啟動基本上是一致的。
ABB機器人本地啟動執行操作過程:先在控制櫃上將模式開關切換到「自動模式」,然後按電機開啟按鈕開啟電機,在示教器上點選「PP移至Main」,將程式指標移動到主程式,最後按「啟動」鍵,啟動機器人自動執行。
在啟動過程中,每一步操作完成後還要檢視機器人是否有錯誤報警,若出現報警要及時處理。
外部啟動也是按照這個流程,只是操作的按鈕、按鍵變成了外部監控器材。啟動中的每一步操作對應1個系統輸入訊號,每一步操作後也會對應的,有一個系統輸出訊號來反饋系統狀態。
以系統輸入輸出為橋梁,按照機器人的啟動流程,使用者只要在PLC或其他外部控制器中,編寫出與系統輸入輸出相關聯的I/O訊號的執行邏輯運行程式,就可以實作ABB機器人的外部啟動執行了。
機器人I/O訊號說明
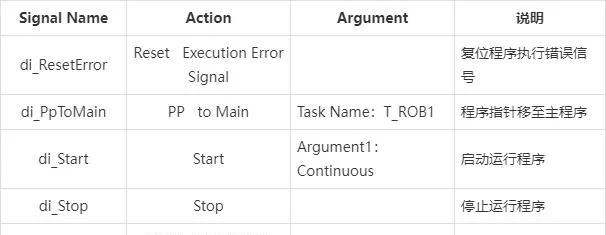
在配置ABB機器人的系統輸入輸出之前,先要配置好要與系統輸入輸出相關聯的I/O訊號,關於這些I/O訊號的詳細說明如下表所示。

註:以上I/O訊號是機器人外部啟動所需的通用訊號,不同的工況,可能會有不同的啟動需求,因此所需的I/O訊號也會有所不同,可根據實際需求進行訊號增減。
系統輸入輸出訊號關聯配置
在ABB機器人示教器上,依次點選「主選單」→「控制台」→「配置」,進入I/O訊號配置界面,如下圖所示。

若未進入I/O訊號配置界面,可以點選「主題」,選擇「I/O」即可進入。
先來配置系統輸入訊號,選擇「System Input」,點選「顯示全部」,如下圖所示。

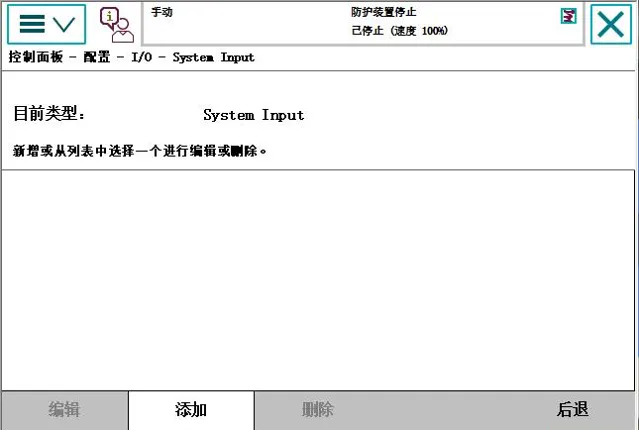
示教器切換到System Input界面,點選「添加」,來添加系統輸入與I/O訊號的關聯關系,如下圖所示。
在系統輸入添加界面中,雙擊參數名稱「Signal Name」,在其後的值處彈出下拉選單,點選「di_MototON」,如下圖所示。

參數名稱下再雙擊「Action」,切換到當前值界面,選擇要關聯的動作,本案例選擇「Motors On」,如下圖所示,點選「確定」。

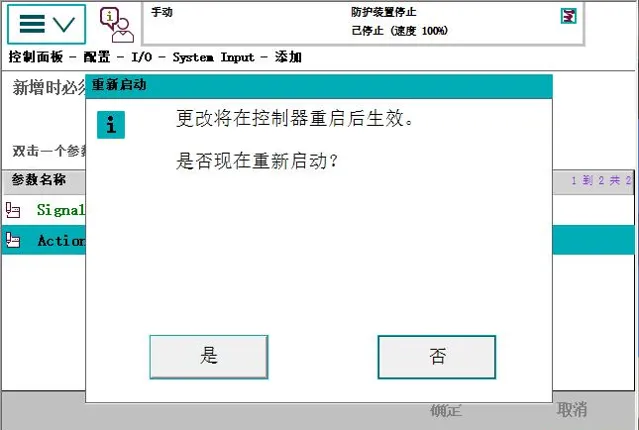
返回系統輸入添加界面,點選「確定」,彈出重新啟動對話方塊,點選「否」,如下圖所示。
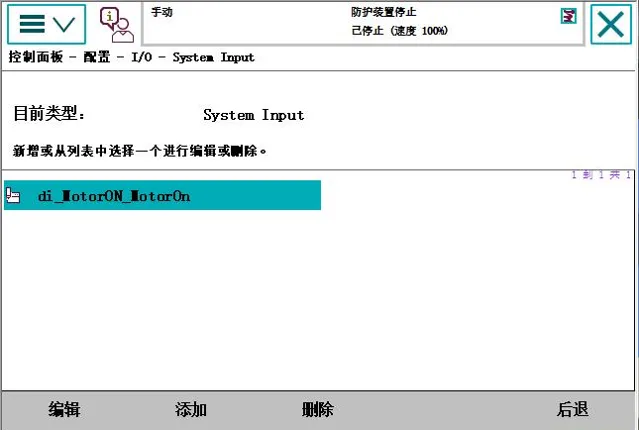
這樣,System Input界面的系統輸入列表中,就添加了電機開啟系統輸入與電機開啟控制訊號的關聯關系列表選項,如下圖所示。
可以參考上述步驟,繼續點選「添加」,來添加其他I/O訊號與系統輸入的關聯關系,有關其他I/O訊號與系統輸入關聯關系的詳細說明,如下表所示。
系統輸入全部添加完成後,點選「後退」,返回I/O訊號配置界面。
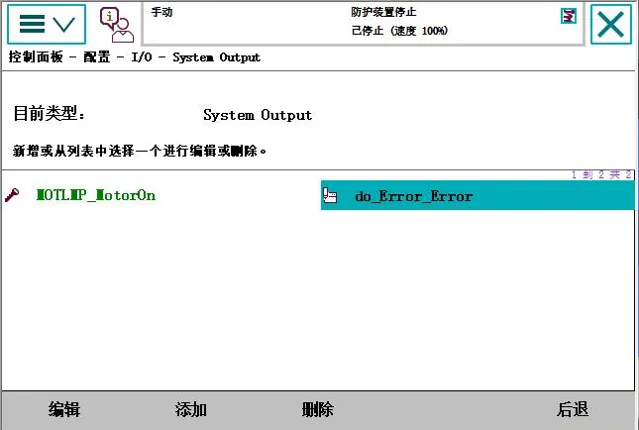
接下來配置系統輸出訊號,選擇「System Output」,點選「顯示全部」,如下圖所示。

在System Output界面中,點選「添加」,來添加系統輸出與I/O訊號的關聯關系,如下圖所示。

進入系統輸出添加界面後,雙擊參數名稱「Signal Name」,在其後的值的下拉選單中,點選「do_Error」,如下圖所示。

參數名稱下再雙擊「Status」,進入當前值界面,選擇要關聯的狀態,本案例選擇「Execution Error」,如下圖所示,點選「確定」。

此時,參數名稱欄下會出現Argument2,這表示可以為其指定要監視的任務,當然也可以不指定來監視所有任務。本案例選擇指定,雙擊「Argument2」,在彈出的下拉選單中點選「T_ROB1」,如下圖所示。

點選「確定」,同樣會彈出重新啟動對話方塊,點選「否」。這樣,System Output界面的系統輸出列表中,就添加了程式執行錯誤系統輸出與程式執行錯誤反饋訊號的關聯關系系統選項,如下圖所示。
可以參考上述步驟,繼續點選「添加」,來添加其他I/O訊號與系統輸出的關聯關系,有關其他I/O訊號與系統輸出關聯關系的詳細說明,如下表所示。
系統輸入輸出與I/O訊號的關聯關系全部配置完成後,重新開機機器人系統,重新開機後關聯關系立即生效。
外部啟動執行測試
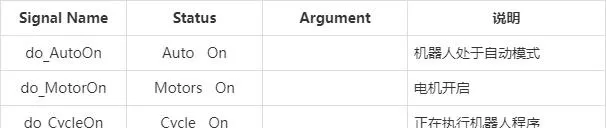
在ABB機器人控制櫃上,先將模式開關切換到「手動模式」,此時電機應為「防護裝置停止」,檢視數碼輸出「do_MotorOn」訊號是否為處於脈沖輸出狀態;將模式開關切換到「自動模式」,檢視數碼輸出「do_AutoOn」訊號是否置位;此時電機應為關閉狀態,「do_MotorOn」訊號復位;置位「di_MotorON」數碼輸入訊號,檢視電機是否開啟,以及「do_MotorOn」訊號是否置位;置位數碼輸入「di_PpToMain」訊號,檢視程式指標是否移至主程式;置位數碼輸入「di_Start」訊號,檢視機器人是否啟動執行,數碼輸出「do_CycleOn」訊號是否置位;置位數碼輸入「di_Stop」訊號,檢視機器人是否停止執行,「do_CycleOn」訊號是否復位;再次置位「di_Start」訊號,檢視機器人是否重新啟動執行。
測試過程中,每一步操作完成後要及時檢視系統是否出現錯誤報警,若有報警則要及時偵錯處理。
附錄A:系統輸入說明
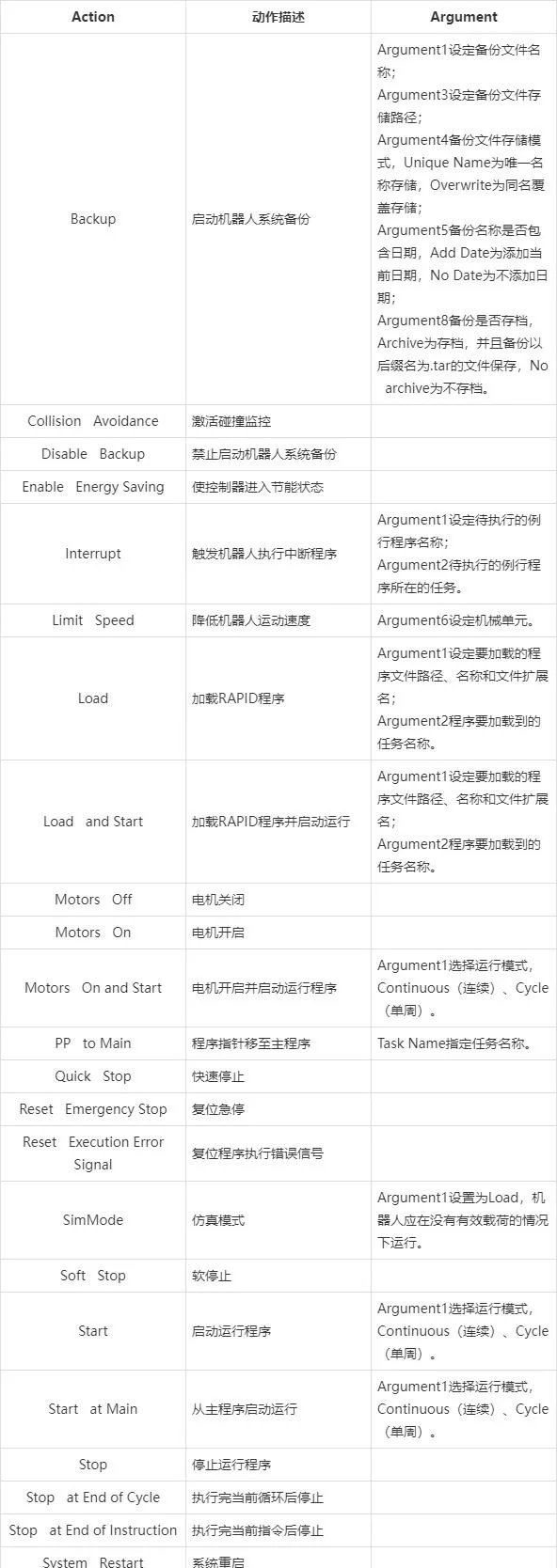
附錄B:系統輸出說明

The End











