大自然中六條腿的蜘蛛常見,六條腿的狗卻找不到。然而前不久,由聯想研究院上海分院自主研發,聯想首款足式機器人——聯想晨星足式機器人GS,卻有著神奇的六足構型。
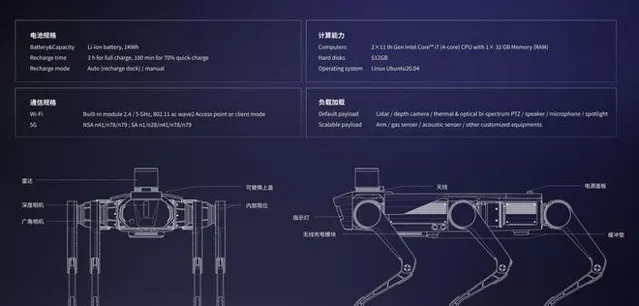
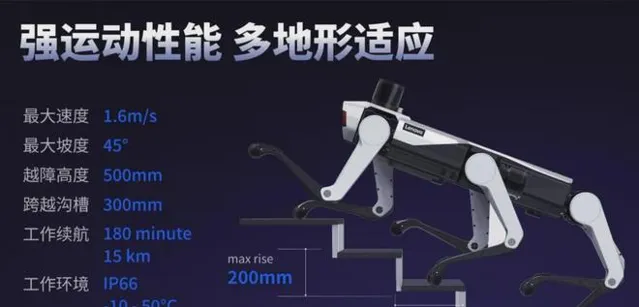
官方介紹,聯想晨星足式機器人GS是一款通用型六足機器人,六足的設計使它具備野外復雜地面越野透過力。它的負載能力可達100KG,具有IP66的防護等級及自適應防滑。未來主要適用於工業巡檢操作,應急救援,野外勘測等套用場景。
▍六足設計的原因
這款機器狗大體造型和常見的四足機器狗差不多,也是反曲臂腿,但它有六條,聯想認為,從仿生學來說,六條腿的生物是地球上分布最廣的、最具環境適應力,相對於四足動物,多出來兩條腿意味著更多的靈活性和一定的冗余度,可以產生更多步態。最典型的三三步態讓Bot GS在任何時候都保持三點著地,形成穩定的三角形支撐,帶來更高的穩定性。
六足機器人可以更加均勻地分散體重,從而更好地適應不平坦的地形和復雜的環境。此外,六足機器人在移動時,可以有更多的腿同時與地面接觸,這有助於提高穩定性和減少搖晃。聯想就展示了這款機器狗在穩定性方面的一些優勢,表現為機器狗能夠擺上紅酒杯移動。
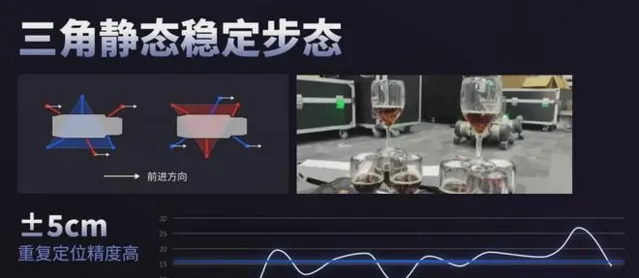
聯想表示,六足帶來的優勢在於,六足機器狗行走中極強的穩定效能幫助提高重復定位精度。實際套用中,足式機器人背負機械臂這些大負載時,就像人背重物一樣,每走一步的小偏移會積少成多變成大偏差,導致足式機器人負重跑遠距離就產生積累出了很大的定位偏差,從而無法準確到達目標點位。這種情況下六足機器人的行走穩定性優勢體現得更明顯,每走一步不會因為背負重物產生偏移,所以重復定位精度可以做得很高,達到正負5cm以內,相當於輪式機器人的定位水平。
除了行走穩定性和負重能力優勢,Bot GS的行走雜訊非常低,它的行走雜訊跟同等距離聽鍵盤打字的音量差不多。這樣一來在室內工作時,對周圍的雜訊影響會降到極低,還可以減少對機器人內建的聲學傳感器的幹擾。基於六足的特異位型,它能在冰面、油汙地面輕松穩定透過而不會滑倒,即使背負重達16kg的作業臂,機器人也不會側翻。

此外,Daystar Bot GS的數據收集能力也是其一大亮點。它可以在任何地點和時間進行全面的數據收集工作,無論是溫度、濕度、氣壓等環境數據,還是地形、地貌等地理資訊,都能被Daystar Bot GS精準捕捉並即時傳輸。這為各行業提供了寶貴的數據資源,有助於企業做出更加明智的決策,增加機器人的多樣性和適應力。
▍四足設計的前因後果
六足機器狗設計曾經在波士頓動力的成長史中留下過一段記憶,但很快該公司舍棄掉了這種方案,並最終選擇了四足的構型。
其考慮的原因非常直接,因為對於機器人來說,每個關節的動力傳輸能量消耗都很大,因此,每條腿最好具有最少數量的節段,兩個節段帶有一個關節,並且該關節需要像腳踝一樣設計成反曲臂腿,以實作高效的向前運動動態穩定性。
機器人外觀和結構設計的最終選擇大多是出於最佳化預期套用的穩定性、移動性和效能的願景,需要綜合考慮步頻、步幅、能耗、穩定性等多個因素,以實作最優的效能和效率。從機械結構設計角度來說,六條腿確實很酷,但這對於演算法提出了太高的要求,反而四足構型相對簡單且易於實作,因為設計師可以透過最佳化腿部結構和運動控制演算法,透過高步頻來進一步提高機器狗的穩定性和機動性。
步頻這個概念表現為足式機器人經常「跺腳」。步頻越高,機器人每分鐘邁出的步數就越多,因此移動速度也就越快,而且在四足機器人的運動中,較高的步頻意味著機器人能夠更快地調整其姿態和位置,以應對復雜或不穩定的環境,這種快速的調整能力有助於提升機器人在運動中的動態穩定性,避免在行走過程中因地形變化而摔倒或停滯。
四足除了步頻較好之外,更進一步來說,機器人的設計通常受到生物學靈感、工程考慮以及它們要執行的特定任務的綜合影響。例如目前四足機器狗大多采取仿生學設計,膝蓋向前彎曲,這樣是為了可實作更穩定、更高效的步態,尤其是足式運動,這種設計可以提供更好的平衡性和敏捷性,使機器人更有能力在不同的地形中導航並執行復雜的任務。此外,使用後向膝蓋還可以促進先進控制系統和傳感器的整合,增強機器人的整體功能,而六足機器狗則有很大區別。
▍價值與創造
但采用六足設計也並非無用,至少在探索新的機器人構型和運動方式研究角度來說這樣存在一定價值。因為機器人構型研究的目標是為了學習節肢動物快速跑步時非常穩定的控制結構和全身力學模式,研究者會透過這種仿生學習,判斷機械結構下,身體和四肢控制架構如何適應牛頓力學約束,規避一系列問題。
目前人類對於運動科學的探索目前還非常初級,機器人運動科學尚未建立作為一個單一的明確定義的學科,雖然有可能將運動力學解構為一個簡單的大腦啟用肌肉,肌肉移動骨骼,骨骼執行工作的單向框架,但這種框架無法包含解釋生物復雜的動態特性,因為神經系統和機械系統動態耦合都在控制過程中發揮重要作用,這帶來了非常復雜的問題。
由於相關的知識基礎跨越了生物學的範圍,目前全球的工程師依然都在嘗試探索神經生理學,生物力學,控制系統工程和非線性動力系統的最新進展,多學科融合整合肌肉,骨骼和神經力學,創造有效的運動行為的機械結構。而仿生學設計能夠更快構建一個節肢動物陸地運動的模型系統,並收集其豐富的實驗數據,概述數學模型,因此四足機器狗成為了目前市場上保留下來的品種。

借助之前對於六足設計的研究,波士頓動力開發出了一款六足機器人RiSE ,但主要設計用於攀爬墻面,機器人無需任何特殊附著力,重量非常輕,每條腿由大約 50 個自由度組成,可以以5厘米/秒的速度爬升,腿部龐大力矩是這個產品的優勢。
聯想這款機器狗出來後,參數被許多網友吐槽,但我們認為,真正做事的人會欣賞別人的努力,這款六足機器狗,未來如果參數能夠持續前進演化,或許也將帶給我們更多驚喜。











