目前,移動機器人在不同驅動環境和效能要求下,展現出了多樣化的結構設計。主流移動機器人包括輪式、履帶式、足式以及混合式幾大類,但輪式機器人結構簡單,執行速度快、操作效率高,負載大,且整體制造成本更低,因而受到市場更多關註。不過傳統輪式機器人在復雜地形下底盤姿態不夠穩定,一定程度上影響了機器人行駛能力。
近日, 華北電力大學控制與工程學院 的研究團隊在【Field Robotics】期刊上發表了一篇最新研究成果。該論文標題為【Four-Wheeled Mobile Robot With Flexible Posture Control】,團隊 提出了一種配備自適應懸掛系統的四輪移動機器人,能夠有效解決機器人在復雜地形下行駛時的穩定性問題。 該研究的核心在於研究團隊將目光轉向了懸掛系統。
▍ 自適應懸掛系統的四輪移動機器人設計框架與創新點
傳統的民用車輛大多采用被動式機械彈簧阻尼減震器,動態效能表現並不理想。近幾年主動懸掛系統在提高車輛行駛平順性方面展現出了明顯優勢,但龐大的伺服液壓系統並不適用於小型移動機器人。因此如何研發一款小型移動機器人適配的自適應懸掛系統,提高小型移動機器人在復雜地形下的行駛穩定性和動態響應效能顯得尤為重要。
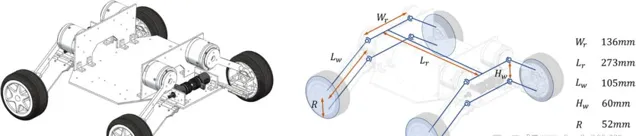
產品設計圖紙和尺寸
華北電力大學控制與工程學院研究團隊采用創新的自適應懸掛系統,該系統由無刷減速電機驅動,徹底摒棄了傳統的機械減震器,同時為了解決四輪系統中由於路面不平導致的振動和傾斜問題,研究團隊還設計了一種虛擬彈簧阻尼系統。該系統透過力控制來模擬傳統彈簧阻尼減震器的效果,確保所有車輪同時與地面接觸,同時吸收多余的振動能量。虛擬彈簧確保車輪與地面有足夠的牽重力,而虛擬阻尼則依靠車身慣性來過濾高頻振動。研究人員表示,透過該設計,能夠有效提高系統的響應速度,避免傳統機械減震器的非線性問題,使得控制更加精準高效。
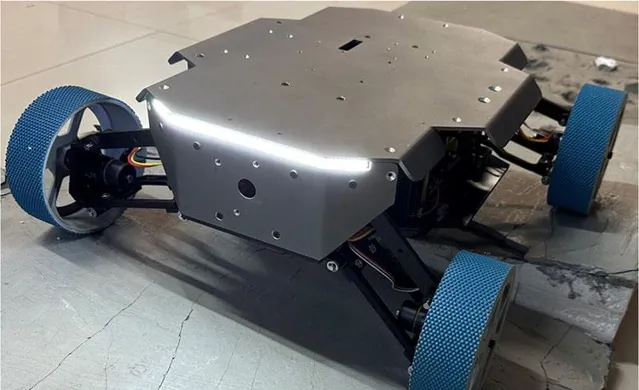
自適應懸掛系統四輪移動機器人設計原型
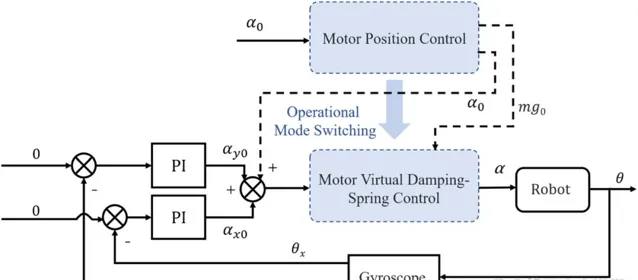
此外, 研究人員還提出引入了一種靈活的姿態控制策略 。該策略以底盤姿態作為反饋,透過線性化處理提高了系統的動態響應。姿態控制分為內外兩個閉環控制:內環采用虛擬彈簧阻尼控制,確保車輪與地面的穩定接觸;外環則根據底盤姿態的反饋調整虛擬彈簧的零點位置,從而實作對底盤姿態的精確控制。
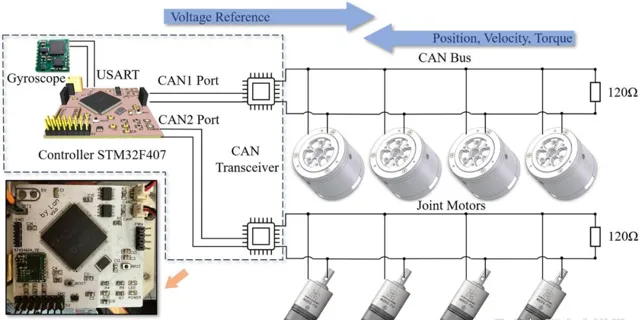
四輪移動機器人電路原理圖
為了進一步最佳化控制系統的動態響應,研究人員對姿態控制中的非線性幹擾進行了反饋線性化處理。 透過引入靜態增益補償,消除了電機輸出與底盤姿態之間的非線性關系,使得控制系統在不同工作條件下都能保持穩定的效能。
▍ 三種路面實測自適應懸掛系統四輪移動機器人綜合效能
為了驗證所提出技術的有效性,研究團隊在三種不同的模擬道路上進行了實驗,包括平坦道路、復雜道路和含7°斜坡的道路。實驗結果顯示,在僅采用虛擬彈簧阻尼控制的情況下,機器人的四輪能夠同時觸地,對角度控制起到了濾波作用,降低了角度變化率。然而,在靜態情況下,虛擬彈簧阻尼控制無法減小角度變化的振幅。 當加入懸掛自適應控制後,底盤角度變化顯著減小, 驗證了靈活姿態控制的有效性。
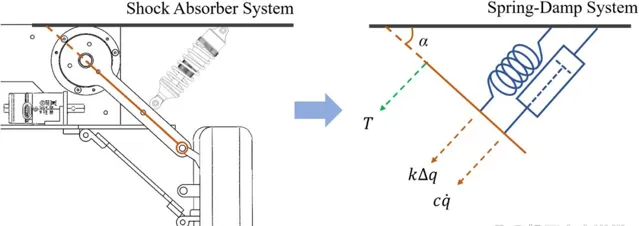
減震器系統及其簡化模型
虛擬彈簧阻尼控制
此外研究人員進一步測試線性化控制對動態響應的影響,詳細記錄了機器人跨越樓梯邊緣時的動態變化。結果顯示,在沒有線性化控制的情況下,機器人前後懸掛的高度差異導致前輪產生了顯著波動,且這種波動在前輪完全接觸地面後仍然存在,一定程度上影響了系統的穩定性。而加入線性化控制後,系統的動態響應得到了很大地改善,波動明顯減小。
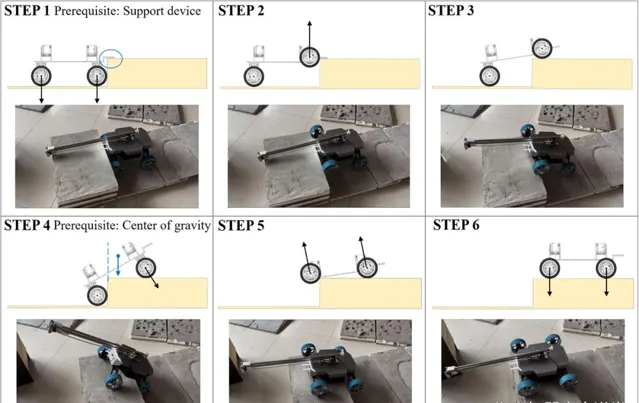
四輪移動機器人爬樓梯動作拆解
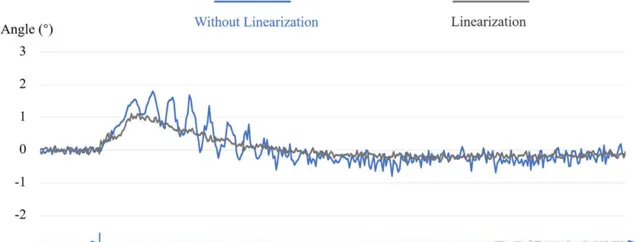
駛過樓梯時線性化的實驗結果
在復雜的戶外環境中,研究團隊對機器人進行了綜合測試,測試環境包括隨機地形、斜坡、碎石和土塊等路況。機器人在該路線上行駛了總共10米,速度提升至0.2米/秒。測試分為兩組進行:一組采用無懸掛控制,另一組則采用靈活姿態控制。

室外道路綜合測試

x軸的實驗結果
y軸的實驗結果
從實驗結果來看,在相同條件下,與無懸掛控制相比, 靈活姿態控制使機器人在X軸和Y軸上的角度變化分別減少了93.1%和87.5%,有效提高了機器人在復雜地形下的行駛穩定性。
▍ 四輪移動機器人在未來四大套用場景下的商業化潛力:
研究人員表示,這種透過自適應懸掛系統和靈活的姿態控制策略結合,四輪移動機器人展現出巨大的商業潛力,在交通運輸領域,該機器人能夠輕松應對不平坦的道路和復雜的地形,確保貨物或乘客的安全運輸。其穩定的底盤姿態和出色的越障能力,使得機器人能夠在惡劣天氣或偏遠地區執行運輸任務,極大提高了運輸效率和安全性。
在影片拍攝領域,機器人能夠保持穩定的拍攝姿態,為攝影師提供清晰的畫面和穩定的視角。透過實際測試,自適應懸掛系統的四輪移動機器人能夠穿越復雜地面,無論是在山地、沙漠還是城市街道,機器人都能根據地形調整車輪高度和底盤姿態,確保拍攝畫面的穩定性。
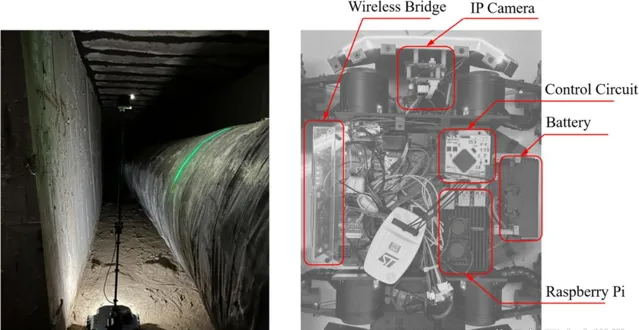
熱力管道隧道檢測及其套用電路
在環境監測和災害救援等任務中,搭載自適應懸掛系統的四輪移動機器人能夠進入人類難以到達的區域進行監測和救援工作。在地震、洪水等自然災害發生後,機器人可以迅速響應,為救援人員提供寶貴的資訊和支持。
除特種領域外,該機器人還能套用於農業、林業等領域的巡視和檢測任務。其靈活的車輪和懸掛系統使得機器人能夠在復雜的自然環境中自由穿梭,對作物生長、病蟲害情況進行即時監測,提高農業生產效率和資源利用率。
▍ 結語與未來:
華北電力大學控制與工程學院打造的自適應懸掛系統四輪移動機器人,透過創新設計虛擬彈簧阻尼系統和靈活姿態控制演算法,並結合反饋線性化技術,實作了機器人在復雜地形下的行駛穩定性和動態響應效能,未來該系統有望在更多輪式移動機器人上得到普及與套用,進入更加豐富的商用落地場景。











