
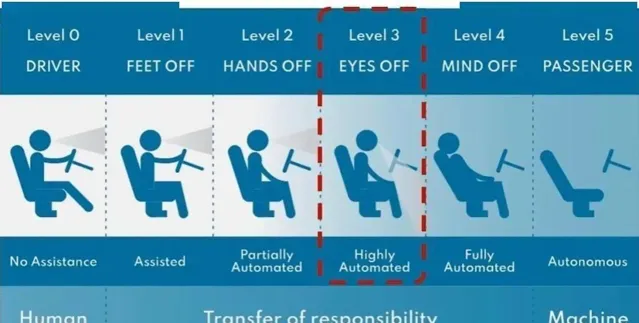
一直以來,在蔚小理三家新勢力車企中,理想汽車的智能駕駛從來都是聲量最大、進度最慢的那個存在。
最近,理想汽車智能駕駛負責人在接受一系列媒體的密集采訪時表示,理想汽車要在今年年底成為自動駕駛行業的絕對頭部。
這種不把蔚來、小鵬放在眼裏的氣概值得喝一聲彩,不過,理想畫的這個餅能實作嗎?要明白這一點,我們首先要搞清楚理想汽車的智能駕駛是怎麽一步一步走到今天的。
01
三年前,在一次論壇上,比亞迪董事長王傳福勸小米雷軍不要造車。船夫哥語重心長地說:「很多大咖進來造車,50個億不算啥,關鍵是浪費三年的時間,這三年時間能值多少錢?」
作為中國電動汽車行業的扛把子和頂級戰略大師,船夫哥的話沒啥錯,但他顯然低估了雷軍造車的決心。透過厘米級復刻和致敬,小米站在巨人的肩膀上三年磨一劍。
將旗下第1款車小米SU7打造成了競爭最為激烈的20~30萬價格帶內的一個爆款神車。

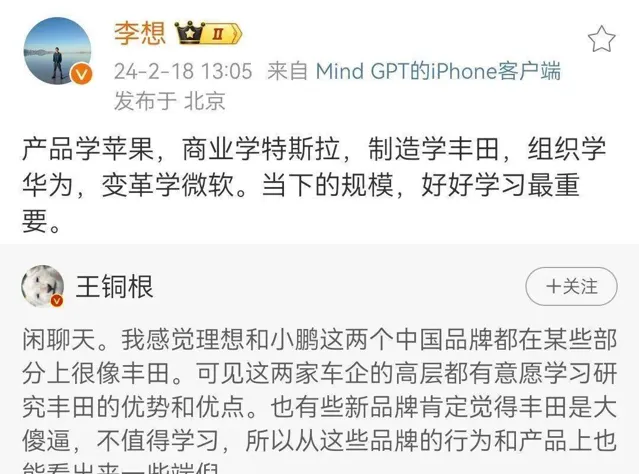
同樣深諳拿來主義可以創造奇跡的另一家車企是理想汽車。李想曾經發表過一個博采眾家之長的言論:「產品學蘋果,商業學特斯拉,制造學豐田,組織學華為,變革學微軟。
」其實,理想汽車致敬特斯拉的地方絕對不只是商業營運,在自動駕駛演算法的研發上,理想汽車便采取了緊密跟隨特斯拉步伐的戰略。
在各家車企都特別強調「全棧自研」的今天,這種說法聽起來似乎有傷理想汽車的臉面,但實際上,這是理想汽車智能駕駛負責人在接受媒體采訪時公開承認的。
其實,「捧特斯拉臭腳」的不只是理想汽車一家,業內基本都一致認可特斯拉是自動駕駛行業的第一標兵,大家爭論的不過是特斯拉領先國內友商多少時間而已。

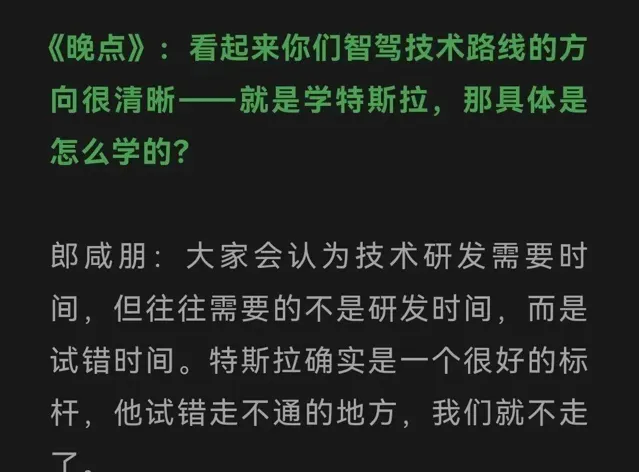
特斯拉之於其他廠商最大的啟發在於怎麽完成從0到1的階段。
從1到10只需要堅持在既定方向上高密度飽和攻擊,但從0到1涉及多個方向的探索、多個技術岔路口的選擇,透過一次又一次的試錯和調整,最終在茫茫的技術深海裏找到一條能通往彼岸的航線。
這可不是條條大路通羅馬,而是自古蜀山一條路,不跟隨成功者的步伐,很容易就掉坑裏了。
理想汽車在自動駕駛上采取「不敢為天下先」的追隨戰略,為自己節省了大量的時間和研發資源。這種務實和堅決是值得很多友商學習的!
02
金句頻出的馬斯克說過這麽一句話,在人工智能時代,數據可能比黃金更有價值。對於全面AI化的自動駕駛演算法來說,數據的重要性從來沒有像今天這麽突出。
數據驅動自動駕駛演算法的進步已經成為了行業共識。換句話說,在演算法架構、技術方向已經探明的情況下,誰掌握了數據,誰就有了最終勝出的底氣。
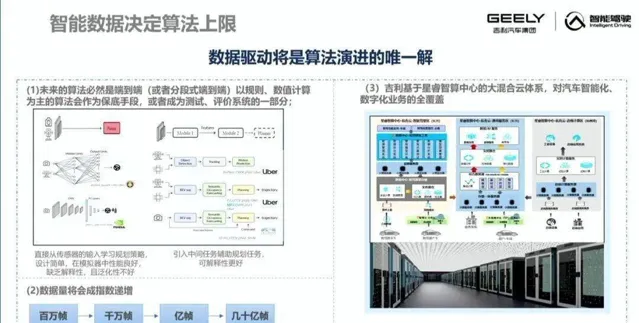
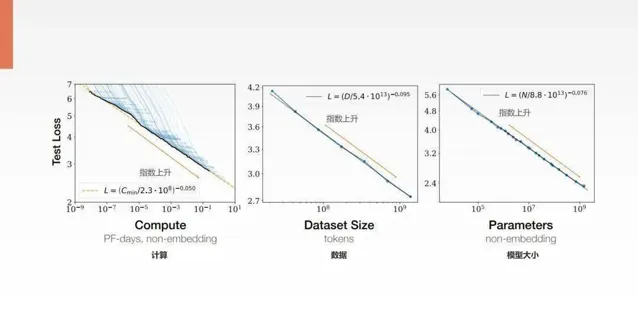
衡量智駕數據有三個指標:數量、質素和分布。雖然自動駕駛演算法並非生成式大語言模型,但它也遵循類似的尺度定律,即訓練數據集的規模越大,訓練出來的模型效果越好。
數據集的大小取決於搭載智駕系統的車型的銷量。在新勢力周銷量榜單上,理想汽車長期霸榜,數據規模當然是杠杠的。
數據的質素主要取決於傳感器配置。自2022年推出理想L9開始,理想AD Max在感知傳感器上一直采用1L1R11V12U的配置,這是被幾家頭部智駕車企證明可以滿足城區高階智能駕駛的傳感器配置方案,理想L6/7/8/9和理想Mega均堅持這種配置,保證了數據的高度一致性。
理想汽車的套娃戰略一直被人調侃,殊不知,套娃戰略保證了傳感器布置數量和安裝位置的一致性,反而成了理想汽車獲取高質素智駕數據的優勢。

衡量智駕數據的第三個指標是分布的多樣性。分布多樣性來自於駕駛場景的豐富性,這個指標和理想汽車的銷售分布密切相關。
因為采取了沒有續航焦慮的增程路線,理想汽車的銷售得以從一二線下沈到三四線城市,車主出行場景更豐富。
而且,由於可以「城市用電,長途發電」,理想車主的出行半徑比小鵬和蔚來車主更長,這也為理想汽車智駕數據的豐富性地提供了有力的保障。

一直以來,增程和套娃都是很多人抨擊理想汽車的槽點,沒想到,在智能駕駛領域,這兩個缺點卻成了促進理想汽車智駕演算法突飛猛進、甚至有可能後來居上的最有力的抓手。這個世界,真是充滿了諷刺!
03
國內電動車圈有個亂象,無論真實情況怎麽樣,輸人不輸陣,大家的口號都喊得震天響。
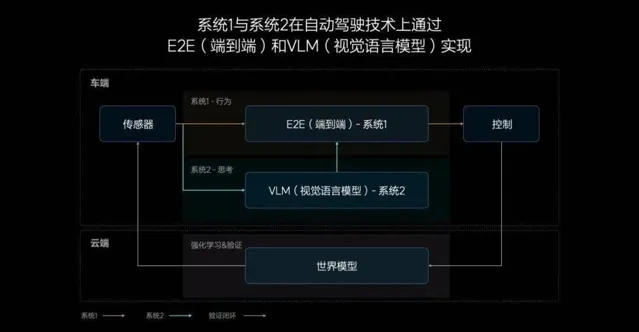
李想在十六屆汽車藍皮書論壇上放了一個大炮仗,表示理想汽車智能駕駛將采取端到端+視覺語言模型的雙系統方案,今年底依靠端到端實作L3,三年內依靠視覺語言模型實作L4。
自Mega啞火之後久居深宮的李想是懂得怎麽搞行銷傳播的。這個表態是一個深水炸彈,話音甫落,在業內,一石驚起千層浪,理想汽車這麽狂?
在業外,讓很多不明真相的群眾對理想汽車的自動駕駛實力產生了深深的好奇。
要知道,早在一年前,大家還都在討論自動駕駛行業需要多少年才能真正邁進L3呢,才一年的時間,理想汽車居然要在三年內就實作L4了!
讓理想汽車和李想本人感到信心爆棚到快要跳出胸膛的是,他們認為已經找到了通往L4級自動駕駛的理論根源。
理想方面表示,其自動駕駛方案的理論來源是諾貝爾獎獲得者丹尼爾·卡尼曼的的【思考,快與慢】中闡述的系統1和系統2理論。
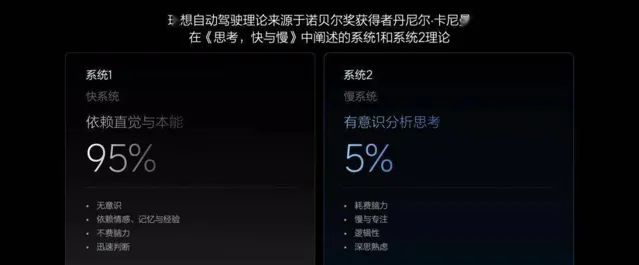
系統1和系統2的智能形態劃分大概沒問題,即便有問題,也不是我輩可以質疑的。但是,將端到端比作系統1,將視覺語言模型比作系統2的類比有問題:端到端並非系統1,視覺語言模型也不是系統2。
首先,系統1包含了對這個世界的認知模式,它可以立即分辨出哪些事情是正常的,哪些事情是出人意料的,其判斷的背後離不開對世界的認識,這也就意味著,系統1同樣是知識驅動的,和端到端的數據驅動完全不在一個領域。

其次,目前的大模型技術錯誤率太高,無法應對復雜駕駛場景,承擔不了系統2的重任。
不要盲信「比喻」,比喻是一個危險的東西!
很少有人懷疑理想汽車的智能駕駛不具備位列第一梯隊的實力,但是,要在年底進入絕對頭部的目標有點過於激進了。
想要跟華為和特斯拉並駕齊驅,哪有那麽容易?











