近來,連續體機器人研究受到越來越多的關註。其 靈活度高,可以調整形狀適應動態環境,特別適合於微創手術、工業⽣產以及危險環境探索等套用。
連續體機器人擁有無限自由度(DoF),為執行空間探索等任務提供了靈活性和適應力。 但隨著⾃由度的增加,連續體機器⼈的復雜性也隨之增加,執行任務時需要⼤量時間進行運動規劃,這又給其實際套用帶來了障礙。
南方科技大學孟慶虎院士團隊對此進行了深入研究,提出⼀種獨特的專為連續體機器⼈量⾝客製的基於 RRT* 的運動控制⽅法
相關研究論文入選 ICRA 2024,並將在ICRA 2024大會上做成果介紹。
基於 RRT* 運動控制方法套用於連續體機器人
運動規劃演算法對機器人導航至關重要,需要同時兼顧地圖資訊、環境特征、速度限制和動態障礙物。
預測性 運動規劃演算法會會考慮機器人當前的狀態,並使用傳感器數據和環境模型來預測其周圍環境的變化,旨在實作特定的目標,如避免碰撞、減少行程時間、節省能源等。
預測性運動規劃演算法通常結合了基於采樣的演算法,如快速探索隨機樹(RRT),以及其高級版本 RRT*。
這些演算法以其簡單性、適應力和處理動態變化的能力而著稱,廣泛套用於機器人、自動駕駛汽車和工業自動化等多個領域,提高了復雜環境下的安全性和效率。
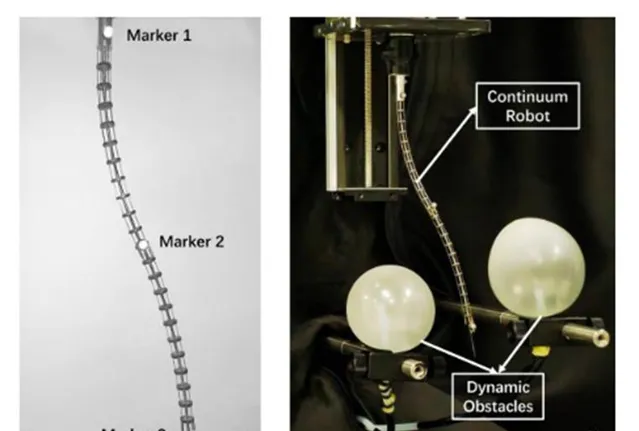
兩段式連續體機器人
盡管基於采樣的方法(如 RRT* 和 PRM)已廣泛套用於機器人運動規劃,但很少有人嘗試將其套用於連續機械臂。
由於連續體機器人具有即時適應障礙物的能力,因此需要強大的感知、決策和控制能力,以確保安全高效的導航。
為了應對這一挑戰,本研究提出一種獨特的基於 RRT* 的運動控制方法,該方法專為連續體機器人量身客製。
該方法利用基於最佳化-雅各布矩陣的方法來實作機器人的穩健控制。透過約束機器人的雅各布矩陣來確保機器人與障礙物之間的安全距離,從而促進有效的幾何避障。
此外,還提出了一種將基於最佳化-雅各布矩陣的方法與 RRT* 相結合的控制演算法,以提高連續體機器人在動態環境中的適應力和效率。
實驗驗證
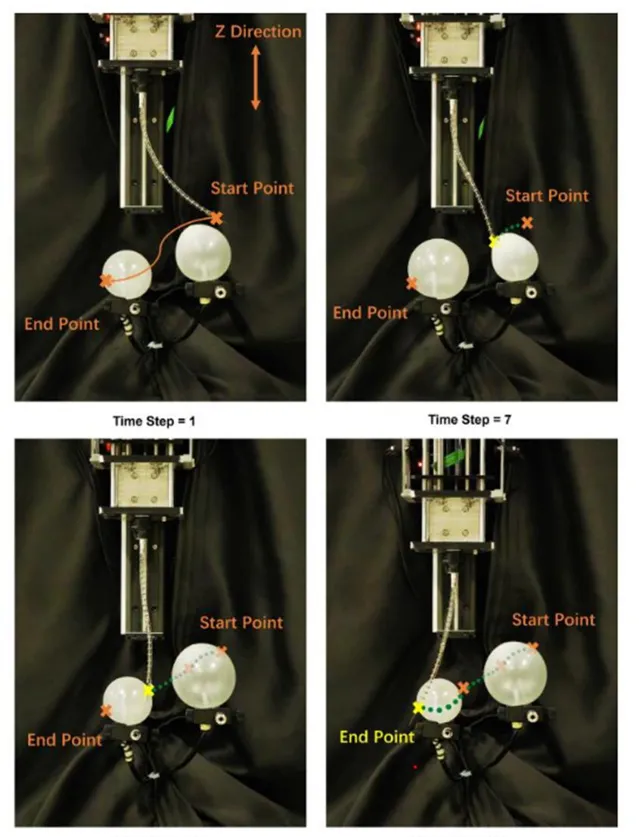
機器人從起點到終點的無碰撞路徑
使用兩段式電纜驅動軟體(連續體)機器人 (CDSR)對所提方法的效果進行驗證。
實驗中使用 NOKOV度量動作捕捉鏡頭 標記跟蹤機器人的底座、近端節段頂端和遠端節段末端的位置,以及機器人在預定路徑上航行時的位置和相關動作。
這些記錄數據揭示了機器人實際位置與預測位置之間的差異,為了解機器人的配置提供了依據。
使用所提方法,機器人可以迅速計算出從初始位置到目標位置的無碰撞軌跡,並成功繞過障礙物。
平均規劃時間約為 8.06 秒,計劃位置與實際到達位置之間的尖端跟蹤誤差約為 5.48 毫米。
該方法保證了安全、快速的響應軌跡生成,具有在嚴苛場景下的魯棒性,具有實際套用價值。
參考文獻:
Luo, Peiyu, Shilong Yao, Yiyao Yue, Jiankun Wang, Hong Yan, and Max Q-H. Meng. "Efficient RRT*-based Safety-Constrained Motion Planning for Continuum Robots in Dynamic Environments." arXiv preprint arXiv:2309.13813 (2023).
原文連結 :
https://mp.weixin.qq.com/s?__biz=MzI2NDA3NzY2Ng==&mid=2648242960&idx=1&sn=5043cfc39c116799a4775489e31c99ee&chksm=f29e731dc5e9fa0b6d2c862b1fbed6c5e88036b9131db8a16bb4567d912bb1b3aa6594e434ec&token=270357786&lang=zh_CN#rd











