確實,現在的車,就是處在: 電動智能的十字路口 。
汽車的傳統崗位,與智能車的崗位。
兩個出身完全不搭嘎的工種,在某種扭曲時空的作用下,擰合在了一起。
他們的工作方式、理念、底層思維、文化都是自成體系的。
甚至:
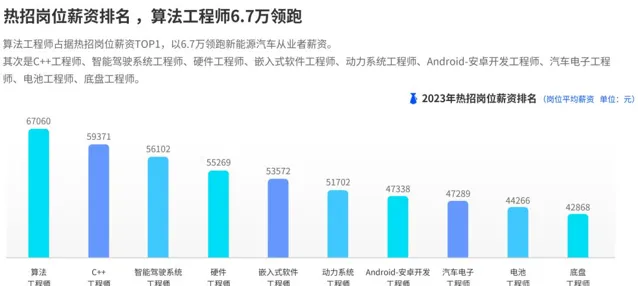
薪金體系、內卷程度,都是完全不一樣的。
其實,現在更缺的就是,
又懂車又懂智能的專業技術人才
。
真正兩個都懂,且能融匯的,鳳毛菱角。

但,這個兩手都要硬
以後可能會是汽車人才的基本要求。
甚至,以後車輛工程的專業課中,就會有智倉、智駕的基礎課程。
所以,現在大學教育還沒有與行業需求完全匹配的情況下:
本科車輛工程碩士演算法,或者本科是演算法類碩士去搞車輛工程。
都可以,都是系統教育。
但是個人建議的順序是:
先懂車,再懂智能
。
因為按我的粗鄙認知,智能不是來顛覆車的,是給車賦能的。
所以,車還是那個最基礎的載體、基礎。
學,就先學基礎,打好基礎。
但是,
職業生涯想要能夠起飛的話,還得懂智能。
至於怎麽準備,怎麽轉?
如果上天再給我一次機會,讓我在車輛工程本科畢業的時候,站在這個十字路口。
我自己會這麽做。
一、可以先去預習下智能駕駛的課程,有個基礎的框架性概念。
列幾個:
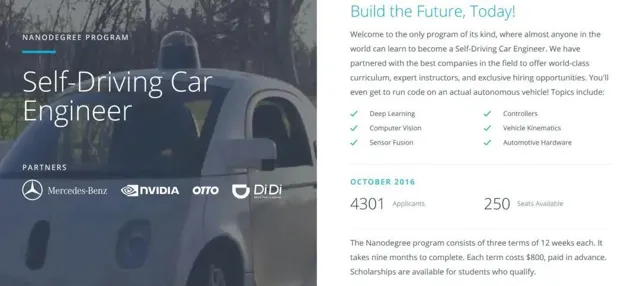
Udacity 自動駕駛納米學位:
這是一個系統的自動駕駛課程,涵蓋感知、定位、路徑規劃等多個模組,適合入門了解自動駕駛的學習者。
Coursera 多倫多大學的自動駕駛課程:
由Steven Waslander教授主講,內容包括自動駕駛的基本概念和技術。
MIT 自動駕駛公開課:
有相對比較新的研究和技術
深藍學院的自動駕駛公開課:
有行業內知名研究者的授課
百度Apollo與Udacity合作的「Apollo自動駕駛入門」課程:
真入門級,我這個門外漢都看懂了
波恩大學的傳感器與狀態估計課程:
B站上有,適合對傳感器技術和狀態估計有興趣的學習者
卡內基梅隆大學的自動駕駛核心課程:
主要講在不同環境中安全高效的自動駕駛計劃和控制技術。
二、然後把那些個智駕論文扒下來看,夯實理論基礎
經典的要看,這是基礎框架。
新的也要看,這個行業的發展還是很快的。
純理論研究的和工程套用的都要看。
列一些:
經典論文
「End-to-End Learning for Self-Driving Cars」 - NVIDIA團隊在CVPR 2016上發表,提出了一種端到端訓練的自動駕駛模型,可以直接從傳感器數據輸出車輛的轉向角度。
「SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5MB model size」 - 由DeepScale公司的研究員在arXiv 2016上發表,提出了一種基於深度壓縮和深度裁剪的摺積神經網絡結構,適用於嵌入式自動駕駛系統。
「PointNet: Deep Learning on Point Sets for 3D classification and Segmentation」 - 史丹福大學的研究人員在CVPR 2017上發表,提出了一種基於點雲數據的深度學習方法,用於自動駕駛中的三維場景理解和目標檢測。
理論研究論文
「Cam4DOcc: Benchmark for Camera-Only 4D Occupancy Forecasting in Autonomous Driving Applications」 - 上海交通大學的Junyi Ma發表,提出了僅使用相機的4D占據預測基準測試。
「SelfOcc: Self-Supervised Vision-Based 3D Occupancy Prediction」 - 清華大學的Yuanhui Huang提出一種自監督的基於視覺的三維占據預測方法。
「PanoOcc: Unified Occupancy Representation for Camera-based 3D Panoptic Segmentation」 - 該論文提出了一種統一的占據表示,用於基於相機的3D泛視覺分割。
工程套用論文
「DriveVLM: A Visual Language Model for Autonomous Driving」 - 介紹了一種利用視覺語言模型增強場景理解和規劃能力的自動駕駛系統。
「LLaDA: Large Language Model Policy Adaptation for Autonomous Driving」 - 輝達和南加州大學的工作,介紹了一種透過使駕駛行為適應新的環境、習俗和法律,使自動駕駛汽車能夠在任何地方行駛的工具。
「LimSim++: A Multimodal Large Language Model for Autonomous Driving」 - 上海AI Lab和浙大的工作,介紹了LimSim的擴充套件版本,專為MLLM在自動駕駛中的套用而設計。

三、研究生選一個有實戰專案的大學
列幾個
1.
清華大學
:擁有智能出行研究所等,由李克強院士、楊殿閣、李升波等領導。同時,清華大學車輛與運載學院、AIR團隊(張亞勤院士等)、MARS Lab(交叉資訊學院,趙行老師)等都在進行相關研究。
2.
北京大學
:智能車輛與移動機器人實驗室(Intelligent Vehicle and Mobile Robot Lab),由趙卉菁教授領導。
3.
北京理工大學
:機械與車輛學院有陳慧巖、龔建偉、熊光明、倪俊等教授在智能駕駛領域進行研究。
4.
北京航空航天大學
:交通科學與工程學院有余貴珍、楊士春、於海洋等教授進行相關研究。
5.
北京交通大學
:資訊科學研究所的趙耀、林春雨等教授也在該領域有所貢獻。
6.
上海交通大學
:智能汽車研究所、智能車實驗室位於機械與動力工程學院,由殷承良、楊明等教授領導。
7.
同濟大學
:擁有「自主智能無人系統」全國重點實驗室、智能車輛與多智能體協同控制實驗室、機器人與人工智能實驗室(RAIL),由熊璐、朱西產、張皓等教授領導。
8.
華中科技大學
:人工智能與自動化學院有王興剛、何頂新等教授在智能駕駛領域進行研究。
9.
東南大學
:至善智能車隊位於機械工程學院,由殷國棟、莊偉超等教授領導。
10.
南京理工大學
:自動化研究院、電腦學院的無人車團隊由任明武、楊靜宇、石朝俠等教授領導。
11.
浙江大學
:控制學院的智能駕駛與未來交通研究中心由劉勇、馮冬芹等教授負責。
12.
國防科技大學
:智能科學學院的智能無人團隊由賀漢根、戴斌、吳濤等教授領導。
13.
湖南大學
:智能車輛課題組由丁榮軍院士、鐘誌華院士等領導。
14.
西安交通大學
:人工智能與機器人研究所由鄭南寧院士等領導。
15.
中國科學院深圳先進技術研究院
:提供基於AI演算法的自動駕駛套用研究的線下實驗室科研專案。
以及,母校也有

歡迎光臨
好了,大概以上。











