在2024世界機器人大會上,人工智能研究所執行主任、波士頓動力公司創始人Marc Raibert的出席和發言備受矚目。RoboX在現場對其演講內容進行了記錄和整理,並據其內容提煉出下文:
一、從研究生物,到研究機器
「對我來說,開發機器人技術的最初靈感來自於動物。」
大約在50年前,Raibert開始從事機器人研究。當時,身為碩士生的他參加了一場大會,並在現場看到了一個機器人。
這個機器人給他帶來了啟發,但並不是因為其設計有多好,反倒是因為它的 缺點 :例如外觀嚇人、移動不夠順暢等。
他頓時覺得,當時的機器人設計思路是完全錯誤的—— 在動物移動的時候,它們可以很好地維持平衡,且不需要限制自己的速度,機器人也應當如此。

在Raibert還在學習生物學和神經控制時,他認為動物的動作非常神奇——它們可以快速奔跑,感知靈敏,動作靈活。它們都為了生存而奔跑跳躍。
即便人類的生存環境雖沒有那麽惡劣,但也能擁有協調的動作。就連 兩歲多的幼兒,在沒有接受任何訓練的情況下,也能做到合理地攀爬。
他回憶道,曾有的機器人擁有6條腿,18個關節。在Raibert看來,這實在太過冗余了。
「如果用逆向思維來考慮,6足機器人可能會有3000萬種可能的步態,那我們是不是也可以做一條腿的機器人?它只有一個步態,那樣就無需考慮如何平衡多樣、復雜的步態。」

但是,對於單足機器人來說,它對動力、平衡、控制的要求都更加嚴苛,所以Raibert也開始考慮做雙足機器人——它的平衡性不僅更好,甚至還可以翻跟頭。
在20世紀80年代初,由於缺乏整合化和小型化的技術,Raibert及團隊會為機器人配備一台外置電腦,但彼時他們已經掌握了動態系統中關於移動的基本原理。
之後的故事大家都知道了,波士頓動力做了四足機器人,它們可以做出各種各樣、更加復雜的運動。
二、從運動智能,到認知智能
到了最近,Raibert的多數工作都與機器人運動智能相關,包括控制零件、保持平衡、控制能量、即時與周邊環境互動,探索周圍物體等等。
但是除了運動智能,還有認知智能。
在ChatGPT影響到世界之前,Raibert就已意識到了這一趨勢,於是在兩年前創辦了人工智能研究所(AI Institute),希望將這兩種智能合二為一。
「不知道我是否能迎頭趕上人工智浪潮,還是會被這個浪潮吹的暈頭轉向,但這確實是讓人興奮的認知智能時代。我們人工智能研究所持有長期思維,而非希望透過銷售產品來賺錢。」
Raibert表示,他希望人工智能研究所能成為純粹專註於機器人技術,以及人工智能未來幾代需求和發展的基礎研究實驗室,為未來的研究者鋪好道路。
他介紹稱,現在人工智能研究所主要關註4個領域。
-
運動智能
-
認知智能
-
硬件設計 —— 在這一點上,Raibert認為如今大家都在關註計算和演算法等軟件問題,導致硬件的重要性遭到了忽視。
-
倫理和道德規範
在運動智能領域, Raibert認為 最典型的設想其實是打造一種高度靈活、運動控制極佳的交通工具,這種工具甚至可以模擬人的動作。
基於此靈感,人工智能研究院設計了一款類似單車的雙輪機器人,它可以自主感知環境並保持平衡,根據規劃,它甚至可以載人彈跳。

他還介紹了另外一個專案—— HALO ,也就是人類運動學習最佳化系統 。其目標是獲得環境高度適應力,同時保持系統的運動特性,該目標將透過機器學習和人工智能來實作,例如透過仿真加強學習。
HALO希望透過大規模的仿真,讓機器人在不同地形、不同特征的環境中進行訓練,以達到相應的運動特征。

「最近我們也將這一技術用到了機器狗Spot身上——我們讓波士頓動力開了一個新的低階別API,直接進行控制。 透過仿真訓練,我們讓機器狗的奔跑速度比此前軟件控制的速度快了一倍。 我們現在已經透過輝達開源了API。「
Raibert不希望機器人使用固定的步態,而是要用最合理、協調的步態獲得最大的靈活性以及速度。 於是,他展示了一個用三條腿「瘸著走路」的四足的機器人,同樣走得很流暢。
「我還記得當年在波士頓動力剛推出機器狗時,它的四條腿好像各自有各自的動法,沒法好好走路。但現在它已經可以用三條腿走路了。」
三、從科幻電影,到現實生活
Raibert的另外一個認知智能專案,叫 「看-懂-做」(Watch.Understand.Do) 。該專案不主張非常復雜的編程,而是讓機器人觀察人類執行任務,並理解它們看到的東西,以及需要實用的技能,然後自己規劃和執行。
「現在,這仍像是科幻電影,但是我想,結合了模型訓練的基礎,再結合運動技能,我們在未來可以在這方面獲得進展。」
其實,在家用機器人方面,人們早已有類似的思路。例如讓機器人在環境當中可以收集資訊,排查機器故障,出現故障之後進行診斷,並且自動維修。 「我相信有一天會實作這些目標,在工業領域之外,在家庭的場景當中也可以實作。」 Raibert說道。

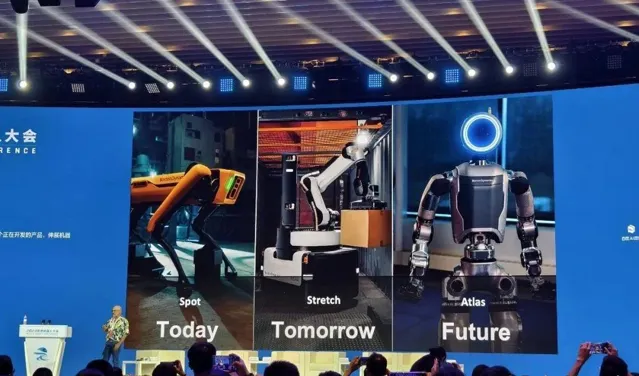
在波士頓動力的產品中,除了商業化較快的機器狗Spot,以及機械臂產品Stretch外,最受關註的還是人形機器人Atlas。
眾所周知,新一代的Atlas由液壓改為電力驅動。據Raibert介紹,它的行動模型預測能力,使其動力控制水平非常高。
「我們開發了Atlas的模型預測能力,因此它可以實作之前無法達到的能力——它能更好地移動、保持平衡,也能將更復雜的任務序列放在一起。例如用雙手來控制物體,包括比較重的啞鈴和貨物。Atlas的視覺感知系統,既可以用於協調它與部件的互動,也可以結合導航功能。」
Raibert介紹稱,在現實工作中,要想讓機器人和環境相協調,需要高精確性和導航。目前,已有機器人可以控制汽車的零件,並且將它們放到位,進行一些組裝工作。
四、A Good Idea ?
Raibert指出,現在正是人形機器人和機器人技術的驚人發展時代,但這同時引發了一個問題: 做人形機器人真是一個好主意嗎?
為了回答這個問題,他展示了波士頓動力倉儲機器人Stretch執行任務的影片,例如卸貨、搬運箱子等。他表示,這些 這種特定功能型機器人同樣能完成任務,它們 利用視覺感知就能工作,也更符合商業邏輯。
「如果我們想制造一台成本更低、在實際套用中效能更高的機器,完全可以簡化這台機器——它可以有人形機器人的一些元素,但是可以進行簡化。 因此,我們做出了這樣可伸展的機器人,其目的就是將卡車上的貨卸下來。它可以移動,也可以將卡車上的貨物卸下來,速率和人差不多,失敗率很低。根據我們在幾家不同公司進行的測試,它在倉居里處理了數百萬個箱子,在真正的倉居里,做著真正的工作。」

Raibert認為,要想評判人形機器人理念的好壞,關鍵還要取決於研發目標—— 「如果你的目標是創造下一代機器人,實作我們對機器人的夢想,讓它們的能力達到人類的水平,那麽我想說,放手去做吧(這也是我的夢想)。」
他表示,人形機器人是個很棒的主意,但如果像利用它在明年或者後年就賺錢,或者大規模地實作商業化,那其實還有很多其他方法可以達成這個目標。











