系好安全帶,人形機器人已經前進演化到 Next Level!
不久前,OpenAI領投的挪威機器人公司1X喚醒了它的機器人大軍,18個人形機器EVE齊刷刷醒來,在房間裏開始工作:

一個機器人從貨架上拿起物品裝進箱子裏:
另一側的機器人配合著將空箱子放在傳送帶上:
靠墻有一排充電樁,兩台機器人緩緩走過來給自己充電,整個畫面看起來和諧又詭異。
一個多月後,1X公司又釋出了新的影片,在短短一段時間內,EVE 機器人又掌握了更多技能!

之前的影片中,機器人的工作環境並沒有人類的參與,這次則展示了人機互動,EVE用鉗子般的雙手疊好一件T恤,雙手遞給面前的人:
除此之外,它還展示了更多在家庭環境中執行任務的能力,開啟頭頂的櫃子,將袋子中的物品收納進去:
抓起桌子上的抹布,輕輕擦掉桌面上的汙潰:
1X官方表示,以上一切動作都是 EVE 機器人自主完成的,1倍速播放,沒有任何影片剪輯技術。
▍已融資1億美元,加速人形機器人發展
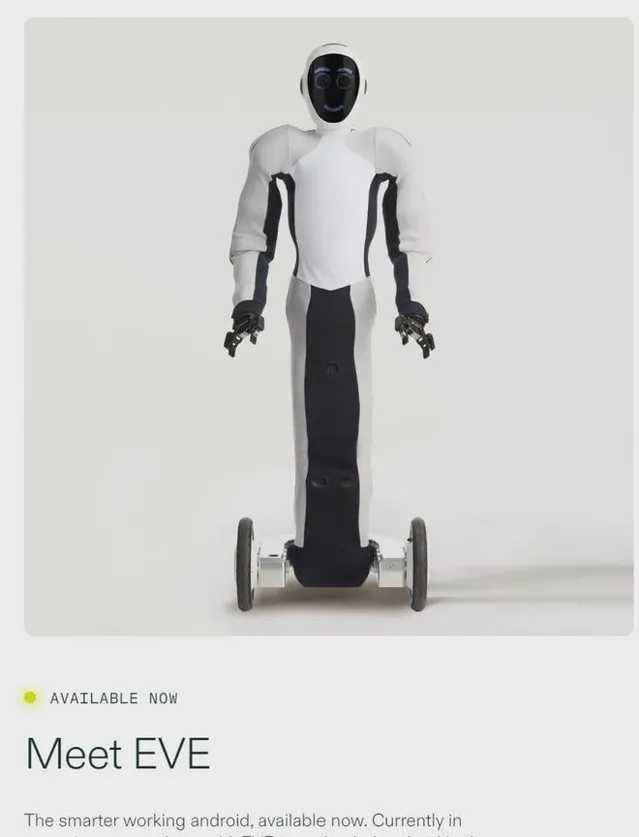
我們先簡短介紹下EVE機器人和1X這家公司。
1X,全名1X Technologies,成立於2014年,總部位於挪威,它的願景是:采用新設計原理建立通用機器人,技術非常安全,可以走出工廠車間,在人類的世界中工作,增加全球勞動力。
1X成立以來,憑借創新開發的 Revo1伺服電機 ,1X自豪地聲稱其擁有「 世界上最高的扭矩重量比 」,這一技術突破為其在機器人領域的領先地位奠定了堅實基礎。
2022年,1X建立了EVE輪式人形機器人,其裝備了照相機和傳感器,用於感知和與周圍環境進行互動。EVE 身高約1.87米,體重約87公斤,最高時速可以達到 14.5公裏/小時,攜帶能力約15公斤,一次充電一小時可以跑6個小時。
2022年初,EVE機器人作為醫護助理機器人首次在醫療行業大展拳腳,並在挪威的 Sunnaas醫院進行了測試,EVE主要在醫院執行後勤工作,減輕護理人員的工作負擔,從而可以更好地照顧患者。
2023年3月,EVE 在兩個工業場所「找」到了保安的工作;今年年初的時候,EVE 還出現在奧斯陸的火車站為旅客倒咖啡。
1X目前已經完成由 OpenAI 牽頭的1000萬美元的A輪融資和2350萬美元的A2輪融資,今年一月,1X宣布成功完成融資金額高達1億美元的B輪融資,有了投資者的支持,1X人形機器人的前進演化速度也是相當迅猛, 那麽EVE機器人最近一個月竟然掌握了這麽多新技能,這到底是怎麽做到的?
▍幾分鐘即可掌握新技能
在結構化的工廠環境中,機器人主要負責執行大量的重復性任務,相比之下,機器人在人類世界中工作會面臨更大的挑戰,因為環境是非結構化的,隨時都會發生變化,如果機器人要撿起地上的雜物,它不可能提前假設物體的位置資訊。
因此,不同於傳統編碼和預定演算法, EVE采取的策略是收集機器人遇到的各種環境數據 ,並從數據中獲得對任務的理解,透過收集大量不同的經驗,機器人可以概括出從未見過的新情況。例如:最開始它們不知道 「抓取」、「分類」、或「巡邏」等概念是什麽意思,但當在各種場景中獲取了這些任務範例後,機器人自己就會學習新的技能。
那EVE是如何獲取的數據呢?
人類操作員利用VR遠端操作機器人,引導機器人完成不同現實世界的場景,這種訓練在1× 的工作室中每天都在進行。人類的決策可以作為很好的數據來源,當大規模地收集這些數據時,EVE 就學會了一項新技能。

透過收集了30個EVE 機器人各種不同的演示數據集,研究人員訓練了一個ML模型,該模型可以理解為一系列廣泛的物理行為,包括打掃房間、撿起物品、與人類安全地互動等等。
然後,研究人員將這個模型微調成更具體的任務序列,讓每個任務與具體的動作行為對應起來。
透過該模型,EVE 利用神經網絡從視覺中端對端地學習運動行為,該神經網絡處理影像,並以10p 的頻率發出控制指令來控制機器人駕駛、手臂、夾具、軀幹和頭部。 該策略可以在桌面GPU 上進行幾分鐘的數據收集和訓練就能讓機器人掌握新技能。
這種方法允許機器人適應和駕馭現實世界地各種情況,從而增強它在動態和非結構化環境中自主執行任務的能力。
▍下一代 NEO機器人,更輕便
除了EVE之外,1X還計劃推出下一代人形機器人——NEO。
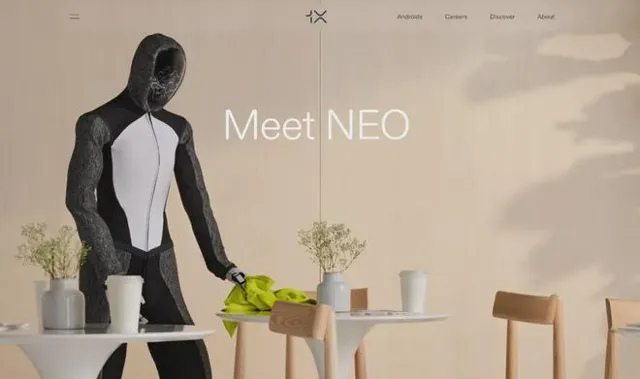
如果EVE是個身高187、體重87kg的壯漢,NEO相比之下就嬌小輕便很多,身高只有165、體重30公斤,但握力足以舉起70 公斤的重物。
與EVE的輪式移動不同,NEO采取了雙足設計,外觀看起來更炫酷,其全身有20個自由度,由肌腱驅動、力控制,設計可承受 1000次跌倒。

在保持輕量化設計的同時,NEO 可以復制人類的速度,甚至超越人類的力量。1X很註重人形機器人的被動安全,NEO 可以在不造成傷害的情況下安全地與周圍環境和人類互動。
傳統的人形機器人齒輪比為80:1,慣性可能相當於腳上承載了24公斤的重量,大大降低了人性機器人的靈活性和適應力;而 NEO的系統極大地降低了這種慣性,相當於腳步僅為0.5。無需使用齒輪即可實作約80%人類肌肉力密度的電機,1X表示,該技術已超過了當前世界記錄的5倍!
EVE和NEO都是能夠自主執行任務的機器人, 不過1X仍然保留遠端控制它們的備案,防止它們無法處理某些特定任務等意外發生。
根據 1X 公司的說法, EVE 是人類歷史上第一個真正成功進入職場的人形機器人。 按照這個發展速度,也許再過10 年、20 年,實體機器人能真正走進我們的生活,成為工作和生活不可分割的一部份,你期待那一天的到來嗎?











