西門子通用小型伺服控制器V90在自動化領域中得到了廣泛的套用,在使用中工程師可能會遇到這樣或那樣的問題,本文給大家介紹一下常見故障F07452的處理辦法。
F07452報警處理
跟隨誤差是軸定位期間位置設定值和實際值之間的偏差,跟隨誤差過大時,超出P2546設定的公差範圍,V90會輸出故障F07452。
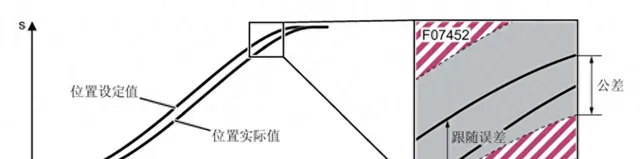
圖1. 跟隨誤差監控
驅動器報F07452的解決方法
1. 首先檢查當前使用的V90 PN固件是否是V1.04.01或V1.04.02的,如是請將固件更新到V1.04.03,新固件對V90 PN中F7452的意外故障問題進行了修復,F7452的觸發條件為:
當以上條件同時滿足時,驅動器可能會產生F7452報警。如果出現此情況請將固件升級到V1.04.03。
V90 PN 1.04.03固件下載連結:
https://support.industry.siemens.com/cs/us/en/view/109746210
2.固件更新後如在執行中仍出現F07452請做如下檢查
歡迎存取西門子工業支持中心平台「連結」獲取更多的資訊。
為您推薦
Startdrive V17 新功能介紹(第1部份)
Startdrive V17新功能介紹(第2部份)











