
小米SU7上市之後的反響不錯,至少在27分鐘裏的5萬台大定,已經證明了它留給了米粉們一個不錯的第一印象,好看好用也好開。有新玩法的座艙體驗,有最低700km的續航裏程,也有32項標配的智能輔助駕駛功能。
公布的這些數據,給我以及準車主們的反饋大概是一致的,這台車三電素質主流水平,入門給400V也給到了頂格的三電配置,但為了性價比做了一定取舍;Pro和Max的三電配置拉滿,智能駕駛硬件堆料也不含糊,而更重要的是它後續的可玩性有很多,包括融合人車家生態這種能改變體驗的能力,是最值的期待的。
選擇小米SU7,當然是沖著它的智能化體驗來的,聊過座艙的新玩法之後,看看它的智能駕駛層面,能不能像雷軍說的一樣,今年躋進智能駕駛第一梯隊。
84TOPS算力,還有期待麽?
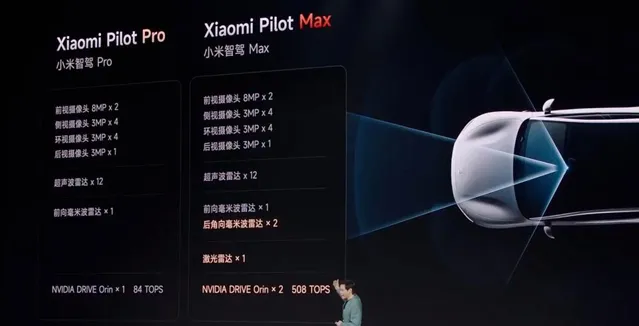
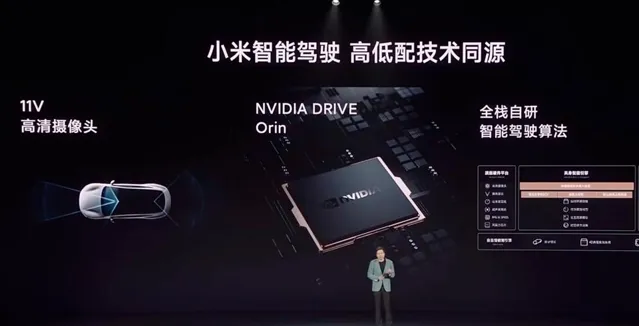
智能駕駛,新能源車下半場必須要卷的方向,所以無論是入門還是高配版,小米SU7的智能駕駛層面硬件都給到了輝達Orin X芯片,以及11V的統一硬件配置,高配的多了1顆激光雷達、2顆毫米波雷達。
入門版的價格,21.59萬元很吸引人,而且有一定的智能輔助駕駛能力;但,入門的配置算力只做到了84TOPS。而這個消費群體的人,關心的肯定是這點算力都能幹嘛,之後又能前進演化成什麽樣。
用著單顆Orin芯片,算力只有84TOPS,看上去讓人很難理解。這裏可能不太關註芯片以及智能駕駛的人會一頭霧水。在SU7入門版配置上,用的是輝達Orin芯片,而高配上用的是Orin X芯片。
Orin芯片的核心,就是普及性,給低價格車型配置上一些基礎的輔助駕駛功能,讓小米SU7標配車型實作了32項智能駕駛功能。Orin的峰值算力是在Orin-X芯片的基礎上做了裁剪,制程還是8nm的,軟件架構上也和Orin-X一樣沒區別。
聊聊泊車部份功能這些看點,以及後來的可行性方案。
交付既能用的高速NOA,沒啥太多要講的,只要感知配置到位,11顆高畫質網絡攝影機+1顆毫米波雷達+12顆超聲波雷達,就能把這個功能給支撐起來;純視覺感知+導航設定,對於高速NOA來說,夠用。
小米的智能泊車輔助(APA),裏面有一個機械庫位泊入。這個難點相對來說,是比較大的,精度是一方面,重要的是需要辨識車身周圍的低矮障礙物,比如10cm左右的邊緣,這在泊車端比較難辦。

毫米波雷達無法辨識垂直資訊,低配又沒有激光雷達,即便有也在前向頭頂的位置,掃不到車輛側面。所以,這個功能的實作主要還是依靠的還是網絡攝影機(純視覺方案的極越01也在推類似的功能)。但,單個網絡攝影機對於顏色的辨識是比較容易產生BUG的點,例如機械車庫邊緣與車位地面顏色一致,很可能會被混為一體。
唯一的解決方案,用雙攝對焦來辨識高度,類似於雙攝手機的「人像模式」的那種演算法,辨識出距離更近的物體;小米SU7在車後方,裝有高、低兩顆網絡攝影機組合,玩手機的廠商做出這種功能,應該不難。
還能期待什麽?

說實話,這些場景都對算力的需求不是很大,工況不算復雜。而這個Orin芯片後續可能還會有一個功能的開發,之前在其他品牌車型上出現過的「通勤路線智能駕駛」,芯片方案也是84TOPS的Orin,而且感知方案還沒有小米SU7上用的多。
這或許才是之後84TOPS最能發揮價值的一個工況,理論上會有一定限制,例如只能記住單一路線的通勤,例如幾公裏轉彎、幾公裏並入環路等,相對來說沒有城市NOA那種自由度,更像是在設定好的路線上去做訊號燈、行人(單車、停靠車輛等)的感知,84TOPS跑滿了來處理這種工況問題不大。
融合之後,體驗感最好的智駕?

聊小米SU7的智能駕駛,已經不能單獨聊它的智能駕駛了,它做的智能駕駛其實是包含了人車家整個生態的,多少都有一些關聯。而這也是它在市場中比較獨特的一個看點,結合人車家生態圈的玩法,應該是比純粹的智能駕駛的體驗感略好一些。
激光雷達不是自研的,128線、最遠探測200米、153萬每秒的點雲,幾乎實錘了是雷軍投的禾賽提供的激光雷達。而小米自研的只是激光雷達的一些演算法而已,包括除汙演算法、反射率演算法、降噪演算法等,為了減少惡略環境對激光雷達的幹擾,變得相對來說更可靠。
背後演算法我可能想的比較簡單,但實作原理應該類似,對傳感器輸入的數據先過降噪演算法類似篩選的性質,再進網絡做決策,這類演算法做的好也很難。
關於其硬件的增加,1顆激光雷達、2顆毫米波雷達以及兩顆Orin-X芯片,算力508TOPS。功能,包含十字路口、丁字路口的右轉、禮讓行人、障礙物路口通行、借道通行、十字路口無保護左轉等以上功能。
看大功能基本都差不多,沒啥差異,總結幾個點來看。
超分辨率占用網絡技術。聽著聽高級的,簡單來說就是放在路側的不規則的任何物體,可以是交通訊號燈也可以是改裝後的電動車等物件,它能實作的是小於0.1米的誤差精度;做到小誤差的特性,應當還是用激光雷達的真值,但可能小米也會融合視覺這類的資訊來做判定,然後就是辨識異性障礙物種類可以做到無上限。然後會收集這種異性障礙物,後續訓練,然後精度會越來越好。

感知決策大模型。和特斯拉FSD V12的邏輯相似,但不一樣。區別在於,特斯拉的端到端是從傳感器數據直接輸出油門/剎車及方向盤轉角;而小米SU7的,是從傳感器數據輸出決策效果,再接上後續的操作和控制模組。小米把端到端先放到了泊車域來驗證,後續可能會發展到智能駕駛域。
然後是融合生態圈之後,智能駕駛的可玩性會增加什麽?
釋出會公布了一個車到家附近,啟用回家模式。如果打通泊車域的話,有一種工況是極有可能實作的,語音控制小愛同學把小米SU7從車庫遙控到指定地點,下樓、開門就能直接上車的方案還是比較容易實作的。這裏面,包括了語音控制、泊出車位、自動駕駛等多個獨立的功能,能打通這一連串功能的套用,將會是更好用的智能體驗。
搶誰的客戶,華為還是特斯拉?
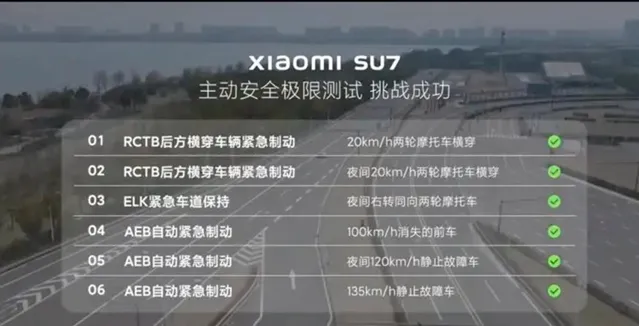
多少都能搶到一些,但對標車型來看的話,Model 3的使用者可能性大一點。但小米在AEB這個點上如果做家用SUV、MPV的話,有點優勢,現在在小米SU7上做到了135km/h剎停的成績,是比較出色的;相比問界M7和智界S7的90km/h和120km/h的剎停成績來看,是有一定優勢。如果小米開始做SUV車型的話,生態、智能、智駕這幾個領域裏,對於問界來講,或許只有問界M9能有稍稍有些優勢。
最後
對於入門版,小米能給的智能駕駛功能基本上給的都差不多了,有了全套的智能座艙,但又不能沒智駕,這會影響很多人買車的決策,於是給了84TOPS這個性價比的智駕芯片選擇,有智駕但不夠全,主打性價比。
客觀來看,入門版是小米想為了以後能做純視覺方案推的一個具備「驗證」能力的版本;如果想要成熟可用,且後續更深度的人車家融合,選後兩個帶全套智駕的版本,才是正解。











