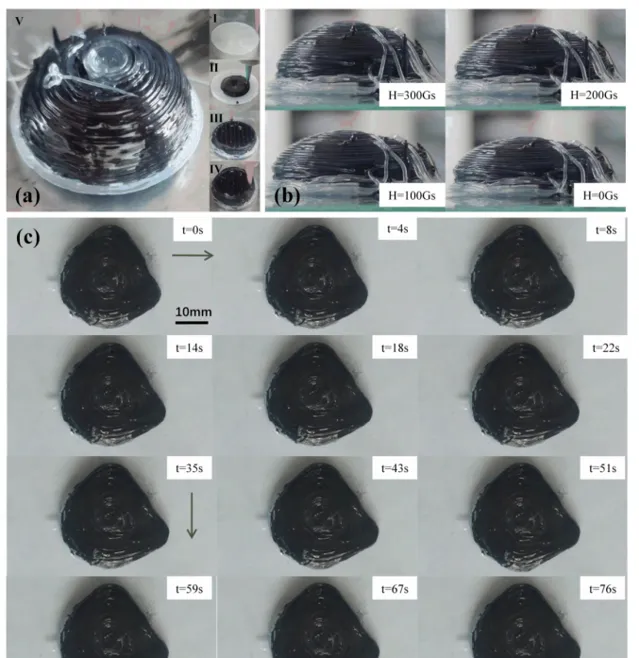
时而蜷缩成球,时而伸展成条
仿照阿米巴虫
自如地进行变形运动
独特的软体机器人
实际是李振坤团队科研成果
新型磁控触变材料与软体机器人
2024年6月,第18届北京发明创新大赛揭晓,由李振坤负责的新型磁控触变材料与软体机器人项目荣获金奖。

磁控4D打印与软体机器人成果获得
2024全国发明展览会与北京发明创新大赛金奖





如今,中关村论坛的常设展厅内,李振坤团队的4D打印与流变机器人正在不断地展示着它的神奇魅力。
流变机器人的真面目???
流变机器人,简单来说,是通过运用4D打印技术生产出的软体机器人,具有极高的灵活性与适应性,「流变机器人」是李振坤团队首次提出的原创科学概念。
「软体机器人最理想的软体形式其实是液体流动,科幻作品中就有很多液体机器人的形象,比如「终结者」、「毒液」等,但是这类液体机器人由于缺少仿生原型,使其难以对自身状态进行感知和有效调控,无法拓展到实际应用。」我们团队根据自主研发的磁控流变记忆材料在2023年发表的一篇论文中在全世界首次提出了流变机器人(Rheobot)的概念,流变机器人仿生对象是单细胞生物,例如阿米巴虫。」李振坤介绍到。




李振坤首次在国际上提出流变机器人概念
李振坤通过材料的磁控溶胶-凝胶转化特性赋予流变机器人变化自己刚度的能力,就像电影中的毒液一样,将自己的身体部分随心所欲地延伸、塑形成武器、装备等各种物体,能够无限变形。这一概念的提出,打破了人们对软体机器人就是利用柔软材料模仿章鱼等生物身体柔软性的刻板印象,未来软体机器人有望实现科幻电影里面描述的液体机器人的强大功能。
李振坤团队采用4D打印制作的全球首个流变机器人
怎么制作「毒液款」流变机器人?
在近几年的科技领域中,软体机器人领域正逐渐崭露头角。但受限于材料和技术的瓶颈,其发展一直难以取得突破性进展。传统的软体机器人大多依赖于弹性材料的变形,但其变形方式相对固定,难以适应复杂多变的环境。因此,如何解决变形受限,将理论概念变为流变机器人实体,成了不可避及的问题。
在一次国际学术会议上,李老师了解到了4D打印技术的潜力:4D打印技术能够使物体在受到外界刺激时能够自动变形,从而实现了从设计理念到实物的无缝对接。这一技术启发了李振坤老师,他意识到,如果将4D打印技术与软体机器人相结合,或许能够解决软体机器人变形受限的问题。
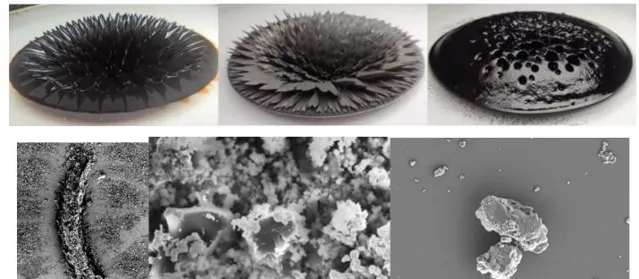
李振坤团队自主研发的磁控流变记忆材料
然而这并非易事,首先面临的是材料选择问题。传统的智能材料在响应性和记忆性方面存在诸多不足,难以满足软体机器人的需求,因此迫切需要一种新材料,为流变机器人提供柔软可舒展的「身躯」。「我的灵感来源于小时候常玩的积木游戏」,谈到新材料研发过程时李振坤如此介绍。「基本的功能组分是微纳米尺度的颗粒与层板,我们要解决的是如何让他们在磁场下自动组装成需要的结构」,经过前期的计算分析和后期的反复试验与筛选,他们最终发明出一种磁控流变记忆材料,这种材料不仅对外界刺激具有响应性,而且表现出一定的记忆性,能够实现溶胶-凝胶过程的可控转化。

北京交通大学团队自主研发的Mag 4D系列4D打印机
但材料的突破只是第一步,接下来是4D打印工艺的设计和优化。要想让软体机器人能够完成复杂变形,李振坤团队需要开发一种全新的打印工艺,将记忆材料精确打印成具有特定结构的机器人。一边需要赋予软体机器人「变形」能力,一边需要设计机器人特定架构,李老师的团队经过了无数次的重复尝试,终于设计出了一种多材料4D打印技术。新技术不仅能够精确控制材料的分布和形态,并且成功把制作一个软体机器人过程缩减到10分钟以内。这与之前制作一个软体机器人需要5到10个小时相比,无疑是一项巨大的突破。在一个个脚印的积累下,李振坤团队设计了全球第一款能够自如进行变形运动的流变机器人。这款机器人采用自主研发的4D打印工艺进行一体化制作,在机器人外部由水凝胶材料制作,相当于单细胞生物的细胞膜,内部由自主研发的新型磁控流变记忆材料制作,通过控制线圈产生的磁场,可以精确控制机器人本体不同部位磁控流变记忆材料的凝胶-溶胶转化,从而实现机器人的变形运动。
流变机器人的无限可能
科研的最终目的是服务社会、推动产业升级。李振坤深知这一点,他在从事工业与软体机器人关键共性技术与前瞻性技术研究的过程中,始终注重将科研成果转化为实际应用。他带领团队与企业联合技术攻关,开发研制了包括整体式全同步螺栓拉伸机、新型齿轮轴矫直机、完全解耦串并混联机器人等在内的多套专用工业机器人等智能装备。
这些装备在核电、煤炭等领域的应用中取得了显著成效,不仅实现了高端自动化装备国内从无到有的突破,更为相关行业的转型升级提供了有力支撑。

李振坤研发的煤矸石分选机器人
以完全解耦串并混联机器人为例,其控制系统无需做繁杂的正逆解运算,立方体的工作空间使其作业轨迹规划变的十分容易,区别于现有的串联、并联机器人,其在整个工作空间上都有均匀的负载能力,不受位姿影响。该机器人可以广泛应用于高速度、高刚度、大负载的场合应用,基于该机器人开发的煤矸石分选系统目前已经应用于开滦集团等大中型煤矿,填补了国内该类自动化装备的空白,该系统由选矸机械手、图像采集和物料排队装置组成,为自动化选矿和筛石提供关键技术支撑,替代人工8名,每年节约成本48万元,降低了人工捡煤、煤矿安全生产的风险,更能推动矿山智能化建设,产生了显著的社会效益和经济效益。
李振坤研发的煤矸石分选机器人
基于磁控智能材料的高精度体素式4D打印技术的问世,解决了智能结构一体化设计与制造的难题,为软体机器人的推广应用注入了新的动力。李振坤与中关村相关企业合作,研发出了全球首台桌面级4D打印机Mag 4D Printer并入选中关村论坛常设展,填补了国内在该领域的空白。利用这一技术,他们制作了多种软体夹持器,并进一步将磁流变原理引入软体抓取中,提出了一种变刚度软体夹持方法,显著提高了夹持重量与稳定性。这些成果不仅获得了包括全国发明展览会金奖、北京市发明创新大赛金奖在内的多项荣誉,更被人民日报、新华社等数十家主流媒体广泛报道,引起了社会各界的广泛关注。



如今,李振坤团队自主研发的4D打印与流变机器人技术已经取得了显著的进步。通过4D打印制作的流变机器人不仅具有极高的灵活性和适应性,而且能够实时感知自身内部材料的分布和流动情况,实现了真正的智能控制。在未来的应用中,这款机器人将有望在体内治疗、军事侦察、星际探索、智能穿戴等领域发挥重要作用。
李振坤

李振坤,北京交通大学机电学院教师、九三学社社员、入选2024-2026北京市科协青年托举人才。
李振坤师从著名磁性液体专家李德才教授。在博士阶段,李振坤深入研究工业机器人理论及应用、磁性软材料流变特性及测量的基础理论,这些研究为他后续在软材料3D打印及4D打印、磁控软体机器人开发等领域的突破奠定了坚实的基础。2019年,他受邀加入清华大学机械系进行博士后研究。2021年博士后出站,李振坤选择回到母校北京交通大学任教。
作为4D打印技术的领航者,他带领团队发明了基于磁控智能材料的高精度体素式4D打印技术,并与企业合作研发了全球首台桌面级4D打印机,推动了该技术从实验室到市场的转变。此外,李振坤在软体机器人领域取得了开创性成果,首次提出了流变机器人的概念,并建立了Rheobot实验室,成为该领域的重要研究基地。他和团队多次获得全国性科技奖项,受到主流媒体的广泛报道。还积极组织开展并参与公益科普活动,为科普教育贡献了交大力量。




李振坤组织开展的大型公益科普活动
追求卓越 挺膺担当
为创新发展贡献交大力量
来源 | 北京交通大学官方微信
编辑 | 林佳旭
来源:北京交通大学











