一、六机器人智能焊接站
(一)整体概述:
1、总体概述:
本六机器人协同作业实验平台,可开展智能无代码编程、数字孪生、通感算一体化等智能制造核心技术的研究测试,进行包括基础硬件系统、电气控制系统、上位机控制系统等在内的设计、部署与安装调试,并以本平台为测试载体,进一步研发建设自动化、信息化、数字化生产示范单元,充分培养信息技术、电气工程、电子技术、生产管理、工业工程以及其他相关专业的综合实践应用和科研创新能力。

GLGY-01型六机器人焊接工作站
2、基本描述:
①本设备作为多机器人协同作业的实验测试平台,以典型的多机器人联动焊接工作站为落地应用对象,使实验平台上的测试研究成果具备可移植性和可复制性;
②测试平台具备完善的安全防护装置;
③本平台基于友好的操作维修便利性考虑,整体操作及使用符合人体工程学,便于操作、拆装和维修,最大程度的降低作业时劳动强度;
④本 设备外观、管线路美观、整洁,设备各部件维修便利,各设备内元器件标识齐全清晰,采用PVC或铝制标牌;
⑤ 电、气路连接采用快插形式,接头可靠耐用;
⑥设备固定稳定可靠,设备正常工作时不会出现明显晃动的情况;
⑦本设备包含项目所必须的软硬件及相关的安调服务,具备一定的可扩展性,后续可新增设备且不影响整体实验平台的稳定使用。
(二)系统组成:

(三)技术参数:
1、平台可适应典型工件尺寸;
2、轨迹精度:输出的机器人轨迹程序可直接用于焊接作业;
3、机器人焊接单元能自动实时起弧、送丝、焊接、熄弧的全过程;
4、六机器人协同作业,轨迹之间不发生干涉;
5、机器人具体参数
① 负载:12kg -20kg;
② 最大臂展半径:1.65m -1.85m;
③ 轴数:6轴;
④ 重复定位精度:优于0.05mm;
⑤ 防护等级:不低IP67;
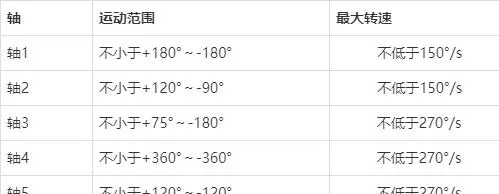
⑥各轴运动范围及最大转速:
⑦电源:3相380V(+15%, -10%),50/60Hz;
⑧机器人自重:≤360kg;
⑨适应最大湿度:95%;
⑩ 适应环境温度:5 ° C-45 ° C;
⑪控制柜形式:紧凑型;
⑫控制硬件:多处理器系统、PCI 总线、大容量闪存、停电备用电源、USB存储接口;
⑬控制软件:成熟可靠的实时OS、高级RAPID编程语言、PC-DOS文本格式、预装软件、另提供DVD版本、扩展功能组;
⑭电源:380V,50/60Hz;
⑮环境温度:5 ° C-45 ° C;
⑯最大湿度:95%;
⑰防护等级:不低于IP54;
⑱操作面板:控制柜上;
⑲示教器:彩色图形界面触摸屏、操纵杆和紧急停机,左右手操作支持,USB存储器支持;
⑳维护 :状态LED指示灯,诊断软件,恢复程序,登陆时间标记功能,预留远程服务功能 。
6、焊接系统参数:
①全数字化控制的逆变电源;由微电脑芯片控制和监测焊接数据和焊接过程;
②可通过计算机加载软件扩展设备功能;可应用于碳钢、镀锌板、薄板不锈钢的焊接;
③ 设备有直流MIG/MAG焊、MIG钎焊功能 ;
④适应碳钢和不锈钢焊接的各种要求,焊机有三种标准的焊接程序,即打底焊程序、强力电弧程序,以及标准直流焊接程序。显示面板设计科学合理,通过一元化调节方式,方便操作员使用;
⑤设备具有温控风扇冷却,以节约能源和超温自动保护功能;
⑥ 有JOB工作方式(记忆),可存储5组焊接程序 ;
⑦具备 数字显示:焊接电流、焊接电压、弧长、送丝速度、电感、JOB记忆序号 ; 焊接结束时屏幕「HOLD」保持着焊接参数实际值 ;
⑧ 送丝机为4轮送丝 ;
⑨焊机故障报警显示及保护功能,提供过压、欠压、缺相、过温及焊机内部故障原因和部位等报警;
⑩冷却水箱带有水流量和温度传感报警开关;
⑪中继线由于冷却水箱的和信号传输衰减原因,配备最长合适长度为20米;
⑫具有数字信号接口通过总线式通讯,可方便的配合全自动化控制的焊接和机器人的焊接。
7、机器人外部轨道及柔性工作台:
① 共两套机器人轨道,单套机器人轨道上安装3套滑台 ;
② 每套滑台额定承载1 T,滑台上安装机器人本体、焊机及其它必要的设备;
③ 滑台轨道有效行程12m,滑台工作移动速度≥1m/s,加速度≥1.2 m/s²,重复定位精度≤±0.05mm ;
④驱动方式:外部轴电机;
⑤运行稳定可靠,齿轮、齿条具有防尘、防焊渣等防护功能,配备限位开关和机械限位,操作部位充分考虑操作安全,不会发生伤人事件;
⑥结构描述
Ⅰ.轨道底座设计合理,结构强度可靠,运行稳定,在厂房或教室地面安装牢固,地脚安装位置预埋钢板,我公司提供详细的预埋施工图纸;
Ⅱ.设置机械限位支架及机械零点插销,避免超程,并能够快速校正零点;
Ⅲ.滑台设置防撞行程开关:
❶避免外侧两个滑台超程,万一发生超程情况,先触发行程开关,后到达机械限位;
❷避免滑台之间发生碰撞,滑台之间安装限位缓冲器,万一行程开关失灵,由缓冲器避免碰撞损坏;
❸行程开关电气参数:端子型接线、无源触点常开、常闭输出,不需供电。
Ⅳ.整体采用全密封式设计,密封罩拆装方便;
Ⅴ.电机、减速机拆装方便,便于维修;
Ⅵ.采用集中自动润滑,润滑油集中回收,不会出现润滑油乱流污染现场的情况 ;润滑系统的控制信号采用PNP型 ;
Ⅶ.机器人安装座的孔位按照机器人厂商 官方底座图纸设计,配φ35mm定位销套 ;
Ⅷ. 轨道设置水平方向、竖直方向可调节地脚,安装时保证直线滑轨、齿条的直线度、平行度,最终保证重复定位精度≤±0.05mm ;
Ⅸ.现场走线、桥架布置等不会出现影响站内焊丝更换通道的情况。
8、安全系统描述:
①运行稳定可靠,齿轮、齿条带有防尘、防焊渣等防护功能,配备限位开关和机械限位,操作部位充分考虑操作安全,不会发生伤人事件;
②在保证设备正常运转的情况下,我们增加了安全标识指示。
9、多机协同控制系统功能描述:
①机器人运行安全控制:配备了必要的安全控制配套,如急停、安全继电器、安全门、安全光栅等,实现手、自动工作状态下整个系统的安全运行,紧急情况安全停机;
② 六机协同控制:实现6台机器人同时启动共同作业 的功能,具体包括机器人的运行时序控制、机器人安全作业区域协同控制等内容;
③无线通信模块;
④机器人运动轨迹可视化模块;
⑤机器人干涉预判:多机协同工作状态下设置安全区,根据运动轨迹规划结果预判干涉碰撞发生的可能性,自动确定机器人之间的避让策略。
二、智能无代码编程传感控制系统
(一)设备整体参数:
1、总体概述:
为提高柔性制造过程的智能化加工和现代化管理水平,本设备以六机器人协同作业实验平台为载体,研发建设智能无代码敏捷编程传感控制系统,进行包括移动式传感控制一体机、无线便携式传感控制器、无线智能触控式光笔、轨迹规划模组等在内的设计、开发、部署与测试,以该平台为测试载体,与后续更多的扩展性智能技术结合,进一步研发建设自动化、信息化、数字化生产示范单元,充分培养信息技术、电气工程、电子技术、生产管理、工业工程以及其他相关专业的综合实践应用和科研创新能力。
2、基本参数:
①本设备为多机器人协同作业实验平台提供智能无代码敏捷编程系统,以客车顶盖焊接典型工件为例,使该系统的研究成果具备向工业现场推广应用的基础;
②传感控制系统具有操作简便、易用的特点,符合人体工程学,最大程度的降低作业时劳动强度;
③ 设备外观、管线路美观、整洁,设备各部件维修便利,各设备内元器件标识齐全清晰,采用PVC或铝制标牌;
④电、气路连接采用快插形式,接头可靠耐用;
⑤无线通讯模块可适应工业生产现场的电磁干扰环境;
⑥设备固定稳定可靠,设备正常工作时不会出现明显晃动的情况;
⑦本设备包含项目所必须的软硬件及相关的安调服务,适应实验平台的电气系统和控制系统,具备可扩展性,后续可新增设备且不影响整体实验平台的稳定使用。
(二)系统构成:

(三)技术参数:
1、视觉传感单元
①视觉传感空间分辨率为0.1mm;
② 图像分辨率不小于2592×2048pixels ;
③ 视野范围不小于3 ;
④ 最佳工作距离1.5m -1m;
⑤ 景深800mm -1000mm;
⑥ 自动升降高度1.8m -3.3m;
⑦在 正确安装镜头以及线缆的情况下,IP防护等级不低于IP30;
⑧ 工作温度0℃ -50℃。
2、通讯计算单元
① 通讯计算综合时延低于50ms;
②数据存储空间为512GB;
③中央处理器:6核;
④轨迹自主规划计算模块;
⑤WIFI 5 (802.11ac 2x2);
⑥ 蓝牙5.0通讯模块 。
3、移动式智能无代码编程传感控制一体机参数
①设备使用效率:
Ⅰ.工作站复用的部署时间为从设备在站边开始架设到开始编程的用时为15min以内,单人操作;
Ⅱ. 设备总编程效率平均1.5min/条焊缝,单人操作 (包含一次示教编程时间,超差焊缝精调时间及空走验证时间。一次输出程序的焊缝轨迹精度不低于目标值,不满足直接焊接的部分焊缝轨迹,可以通过快速精调功能,调整至满足焊接精度要求,整体时间控制在总编程节拍时间内);
②干涉避让:所生成的机械臂运动程序,不会与周边夹钳、定位块及框架等发生碰撞,机器人之间、机器人与导轨滑台之间不会发生碰撞。
③过程控制交互:对于多机站,干涉区互锁逻辑与现场工作站兼容,自动生成程序的模板中已做好干涉区交互设置。
④工艺参数交互
Ⅰ. 焊接工艺参数设置:在示教过程中快速设置焊接参数、摆动参数(蓝牙模块上不低于5组可选),可通过控制器鼠标键盘或触摸屏配合光笔实现,方便易操作,单条焊缝参数设置时间不 会 超过5秒;
Ⅱ. 焊接顺序及程序可读性:操作人员根据现场标示的焊接顺序进行编程示教,生成的每一个焊缝的焊接指令自动加编号注释(如1、2、3……等),焊缝指令编号与示教顺序一一对应,便于后续人工修改调整;新生成的程序工件坐标系与现有旧程序的工件坐标系兼容,确保后续手工局部修正点位时便于人工操作。
⑤快速精调功能
对于批量轨迹超差焊缝,通过包角的快速精调功能进行焊缝长度的校准,直观,快捷。可通过工控机或者平板电脑等来实现快速微调功能,可不依赖机器人示教器。
⑥一体机系统(含视觉系统、整体支架结构、工控机、显示器、线缆)设计描述:
Ⅰ. 系统设计轻量化,一体机在水泥地面人工推动的匀速推动力不超过30N,最终 设计以满足方便人工推动使用为准;
Ⅱ.使用电缆为高柔电缆或电缆备件;
Ⅲ.包含触摸屏高度等设计以方便操作人员站立使用为准;
Ⅳ.设计叉车叉运机构;
Ⅴ.设计设备不使用时的防护方案;
⑦其它参数:
Ⅰ.自动生成的焊接轨迹可避免机器人在焊接时其附带的气管电缆等过度缠绕,可确保各个关节无接近极限位置角度,机器人姿态平顺;
Ⅱ.编程软件具备账户登录及编程数据记录功能,可导出编程记录,记录内容包括:编程账户、程序名称、编程时间等,记录存储时间高于3年;
Ⅲ. 机器人设备使用过程TCP焊枪发生偏移后,只通过校准焊枪本身TCP的简单校准操作(如6点法)后就可具备光笔编程设备的继续使用 ,光笔编程设备不会因此再进行额外复杂的操作,影响设备使用效率。
4、无线便携式智能无代码编程视觉传感器参数
① 总重量不超过5kg ;
② 具备快拆快装机构,兼容1/4英寸螺纹;
③Binning支持1×1,1×2,2×1,1×4,4×1,2×2,2×4,4×2,4×4;
④ 下采样支持1×1,2×2 ;
⑤支持水平镜像,垂直镜像;
⑥ 数据接口Gigabit Ethernet(1000Mbit/s)兼容Fast Ethernet(100Mbit/s) ;
⑦WIFI 5 (802.11ac 2x2);
⑧ 蓝牙5.0通讯模块 ;
⑨ 数字I/0 6-pin Hirose接头提供供电和I/O:1路光耦隔离输入(Lne0),1路光耦隔离输出(Line1),1路双向可配置非隔离I/0(Line2);
⑩电压 范围5 -15VDC,支持PoE供电。
5、无线智能触控式光笔参数
① 可通过触控UI实现工艺参数的选择和示教点的删减修改;
② 光笔指示灯显示具备可见性、可达性;
③ 仿焊枪光笔设计小巧易用,方便操作工握持,具有良好的人机工程,重量≤0.5kg, 可减轻操作人员体力劳动强度;
④仿焊枪光笔可适应在各个焊缝位置示教的姿态和角度,保证可见性;
⑤仿焊枪光笔在正常使用时不需要校正,如出现意外磕碰、或者更换易损件后可在现场快速校正,如果出现严重的变形无法校准的情况,返厂校准即可。











