在快速迭代的工业自动化与机器人控制领域,高性能运动控制器无疑是实现极致精度与效率的核心引擎。实时操作系统(Real-Time Operating System,RTOS)凭借其低延迟与高度确定性的特性,成为这些高精度、高速度应用的首选平台。
望获实时Linux,作为Linux通用性与望获实时增强技术的完美结合,为高性能运动控制器的适配开辟了新纪元。本文旨在深入探讨基于望获实时Linux的适配策略,涵盖实时任务编程、运动控制算法实现,以及望获实时Linux如何为高性能运动控制器提供强大支持。
高性能运动控制器
高性能运动控制器是现代工业自动化的心脏,它们以高精度、高速度、实时控制及高度灵活性著称,广泛应用于数控机床、机器人、自动化装配线及先进医疗设备等领域。这些控制器通过精确控制位置、速度和加速度,确保生产过程的稳定与高效。具体而言,特点如下:
高精度:满足半导体制造、医疗设备等领域对极端精度的需求。
高速度:提升生产效率,缩短生产周期。
实时控制:确保时间敏感任务的无缝执行,如机器人手术和高速包装。
灵活性:支持多种控制算法,适应不同应用场景的定制化需求。
高性能的典型应用有:
数控机床:在数控机床中,高性能运动控制器用于控制刀具的精确运动,以确保加工零件的高精度和高表面质量。
机器人:在机器人应用中,这些控制器用于控制机器人关节的运动,使机器人能够执行复杂的任务,如组装、焊接和搬运。
自动装配线:在自动化装配线上,高性能运动控制器用于控制各种机械手和输送系统,确保各个部件的精确和同步运动,提高生产效率。
医疗设备:在医疗设备中,例如手术机器人和放射治疗设备,这些控制器用于精确控制运动,以提高治疗效果和病人的安全性。
高性能运动控制器在工业自动化和机器人技术中扮演着关键角色。通过提供高精度、高速度、实时控制和灵活性,这些控制器能够满足各种应用的严格要求,推动技术进步和效率提升。而高性能运动控制器的底层软件平台是实时操作系统,底层实时操作系统的通用性、实时性、响应快速性和稳定性直接决定了高性能运动控制器的精度、速度和灵活性。下图[1]给出了操作系统与高性能运动控制器的关系。
图1 操作系统与高性能运动控制器的关系
实时任务编程、运动控制算法实现
在望获实时Linux系统中,首先要编写和配置实时任务,以确保运动控制的高性能和确定性。可以使用POSIX实时扩展(如pthread库)创建和管理实时任务。例如:
1 #include <pthread.h>
2 #include <sched.h>
3 #include <stdio.h>
4 #include <stdlib.h>
5
6 void* real_time_task(void* arg) {
7 while (1) {
8 // 运动控制任务逻辑
9 // ...
10
11 // 控制周期
12 usleep(1000); // 1ms
13 }
14 }
15
16 int main() {
17 pthread_attr_t attr;
18 pthread_attr_init(&attr);
19 pthread_attr_setinheritsched(&attr, PTHREAD_EXPLICIT_SCHED);
20 pthread_attr_setschedpolicy(&attr, SCHED_FIFO);
21
22 struct sched_param param;
23 param.sched_priority = 99; // 设置高优先级
24 pthread_attr_setschedparam(&attr, ¶m);
25
26 pthread_t thread;
27 if (pthread_create(&thread, &attr, real_time_task, NULL)) {
28 fprintf(stderr, "Error creating thread\n");
29 return 1;
30 }
31
32 pthread_join(thread, NULL);
33 return 0;
34 }
在上图中,第17行-24行对运动控制线程的实时属性进行了设置。第8行到第11行间歇性地对运动控制器发出控制命令,具体的控制指令通过EtherCAT等[2]协议传输。EtherCAT协议的特点是:使用标准以太网硬件和基础设施:降低成本并简化与现有系统的集成;采用主从构架:EtherCAT网络由一个主设备控制,控制网络,以及多个从设备执行控制任务;EtherCAT提供快速通信,周期时间通常少于100微秒,非常适合要求严格的实时应用。
望获实时Linux与高性能运动控制器的深度融合
在望获实时Linux平台上,实时任务的编程是实现高性能运动控制的基础。通过利用POSIX实时扩展(如pthread库),开发者可以高效创建和管理实时任务,确保控制逻辑的精确执行。同时,望获实时Linux提供的丰富API和工具集,简化了运动控制算法的部署与调试过程。
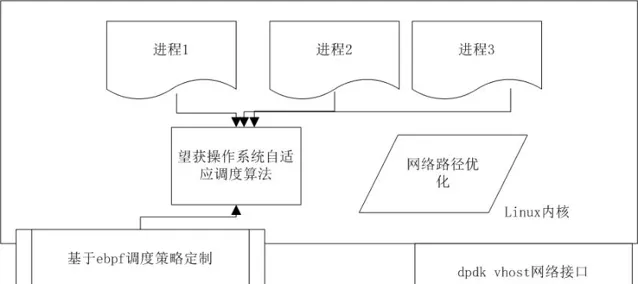
图3 望获实时Linux实时增强机制
望获实时Linux不仅继承了Linux的广泛兼容性和强大功能,还通过一系列创新技术进一步提升了实时性能。其核心优势包括:
自适应调度算法:在Linux PREEMPT-RT基础上,引入CPU使用率、内存及I/O统计等多维度考量,实现更智能的调度决策。通过ebpf技术,用户可灵活定义调度策略,以适应复杂多变的控制场景。
dpdk vhost网络接口:显著降低网络延迟,提升控制精度,尤其适用于分布式控制系统。
内核网络路径优化:减少不必要的开销,确保控制指令的快速传输与处理。
在数控机床、机器人、自动化装配线及医疗设备等领域,基于望获实时Linux的高性能运动控制器已展现出卓越的性能。通过实践验证,该技术方案不仅提升了控制精度与速度,还增强了系统的实时性与稳定性,为工业自动化与机器人技术的进一步发展奠定了坚实基础。
总结
国科环宇依托深厚的技术积累与实战经验,成功推出了基于望获实时Linux的高性能运动控制器适配方案。该方案不仅保留了Linux的通用性与兼容性,还通过自研的调度算法、网络优化技术及先进的网络接口技术,实现了高性能、高实时性、高精度与高鲁棒性的完美结合,为工业自动化与机器人技术的未来发展注入了强劲动力。
参考文献
[1] Motion Control Software | Software Tools | Positioning Solutions
[2] What Is EtherCAT Protocol and How Does It Work? | Dewesoft











