在机器人腿部设计过程中,轴承在关键关节处扮演着不可或缺的角色。本文聚焦于足式机器人腿部关节滚动轴承的精度设计。由于本人尚处学习阶段,若各位专家有更深入的见解或经验,敬请不吝分享。
先来了解滚动轴承的基础知识:
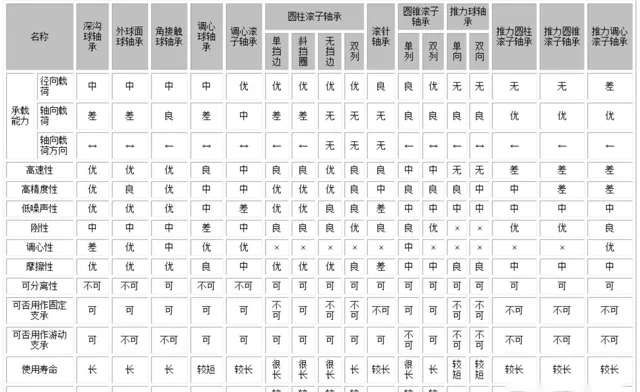
按承受负荷的方向划分,滚动轴承可分为向心轴承(主要承受径向力)、推力轴承(主要承受轴向力)以及角接触轴承(能同时承受径向力和轴向力)。我曾尝试使用一对单列角接触轴承作为机器人膝关节的轴承,但发现角接触轴承内圈与外圈之间存在一定的径向摆动自由度,导致膝关节除了能够绕轴向转动外,还会在径向方向产生摆动。
按滚动体的形状分类,轴承可分为球轴承、圆柱滚子轴承、滚针轴承、圆锥滚子轴承等多种类型。
各类轴承的工作性能差异显著
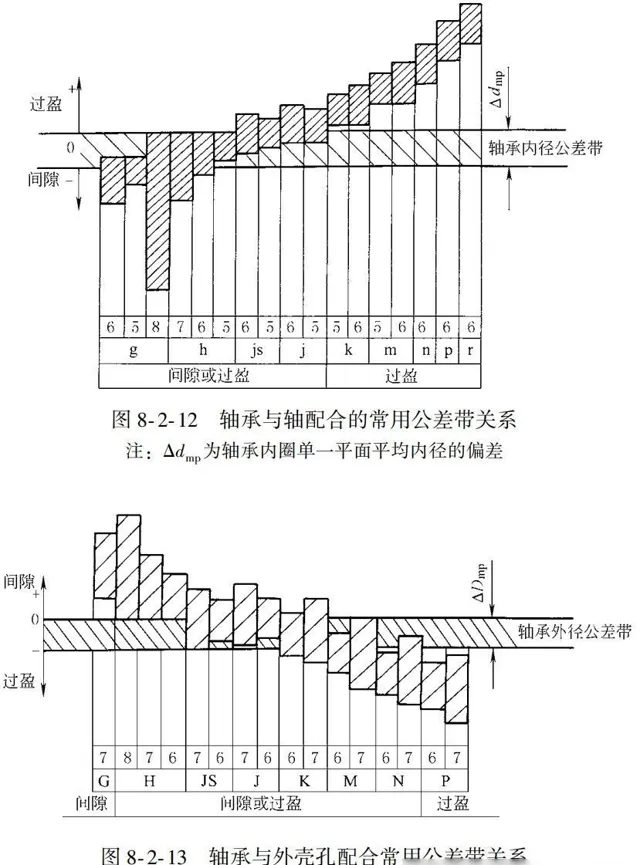
滚动轴承的精度主要根据其尺寸精度(包括内径d、外径D和高度B的公差)以及旋转精度(内外圈相对运动时的跳动程度)来划分,共分为五个等级。
这五个等级分别是0、6、5、4、2,其中0级精度最低,2级精度最高。需要特别注意的是,推力轴承和圆锥滚子轴承的精度等级略有不同,推力轴承仅有四级(0、6、5、4),而圆锥滚子轴承也为四级(0、6X、5、4)。
在选择轴承等级时,需综合考虑转速n和旋转精度的要求。
0级轴承适用于一般旋转机构中的低、中速及旋转精度要求不高的场景,如普通机床变速箱和普通电动机等。
至此,我们已确定了滚动轴承的公差等级。

总结:通过对滚动轴承的深入了解和精度等级的选择,我们可以为足式机器人腿部关节的设计提供更为精确和可靠的解决方案。











