概述
一般情况下,机器人都具备本地启动运行与外部启动运行功能,ABB机器人也不例外。
通过在示教器上按「启动」键来启动ABB机器人自动运行的模式,我们可以称为本地运行模式。相对的,通过外部信号(如外接按钮、PLC、HMI、PC等)来启动机器人自动运行的模式称为外部启动运行模式。
ABB机器人外部启动运行有多种实现方法,其中最为常用的是基于系统输入输出信号的外部启动运行方法。
系统输入输出是ABB机器人控制器中用于控制和反馈系统中某些特定功能的一系列I/O信号接口,用户可以将I/O信号与之相关联,以实现对机器人系统关键信息的监视与控制。
机器人外部启动工作流程
机器人外部启动可以看作是本地启动的扩展,它的启动工作流程与本地启动基本上是一致的。
ABB机器人本地启动运行操作过程:先在控制柜上将模式开关切换到「自动模式」,然后按电机开启按钮开启电机,在示教器上点击「PP移至Main」,将程序指针移动到主程序,最后按「启动」键,启动机器人自动运行。
在启动过程中,每一步操作完成后还要查看机器人是否有错误报警,若出现报警要及时处理。
外部启动也是按照这个流程,只是操作的按钮、按键变成了外部监控设备。启动中的每一步操作对应1个系统输入信号,每一步操作后也会对应的,有一个系统输出信号来反馈系统状态。
以系统输入输出为桥梁,按照机器人的启动流程,用户只要在PLC或其他外部控制器中,编写出与系统输入输出相关联的I/O信号的执行逻辑运行程序,就可以实现ABB机器人的外部启动运行了。
机器人I/O信号说明
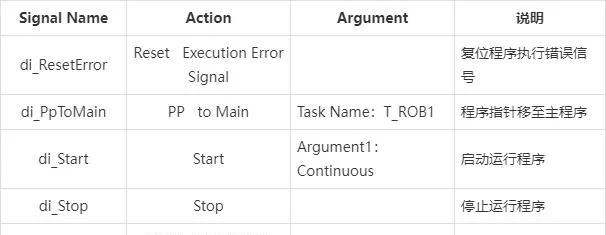
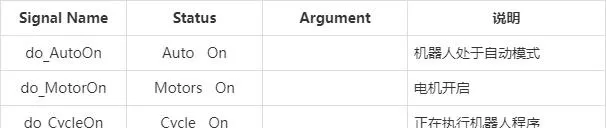
在配置ABB机器人的系统输入输出之前,先要配置好要与系统输入输出相关联的I/O信号,关于这些I/O信号的详细说明如下表所示。

注:以上I/O信号是机器人外部启动所需的通用信号,不同的工况,可能会有不同的启动需求,因此所需的I/O信号也会有所不同,可根据实际需求进行信号增减。
系统输入输出信号关联配置
在ABB机器人示教器上,依次点击「主菜单」→「控制面板」→「配置」,进入I/O信号配置界面,如下图所示。

若未进入I/O信号配置界面,可以点击「主题」,选择「I/O」即可进入。
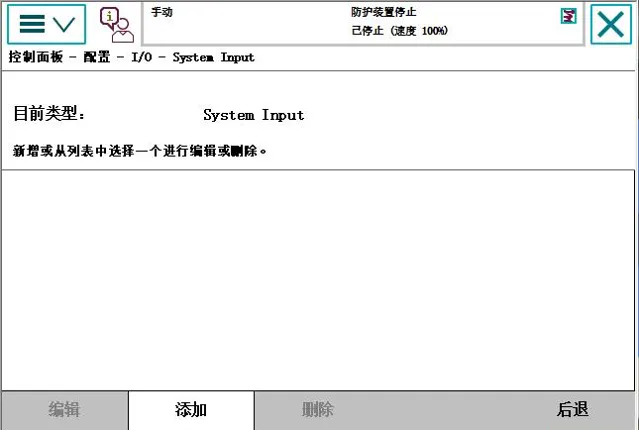
先来配置系统输入信号,选择「System Input」,点击「显示全部」,如下图所示。

示教器切换到System Input界面,点击「添加」,来添加系统输入与I/O信号的关联关系,如下图所示。
在系统输入添加界面中,双击参数名称「Signal Name」,在其后的值处弹出下拉菜单,点选「di_MototON」,如下图所示。

参数名称下再双击「Action」,切换到当前值界面,选择要关联的动作,本案例选择「Motors On」,如下图所示,点击「确定」。

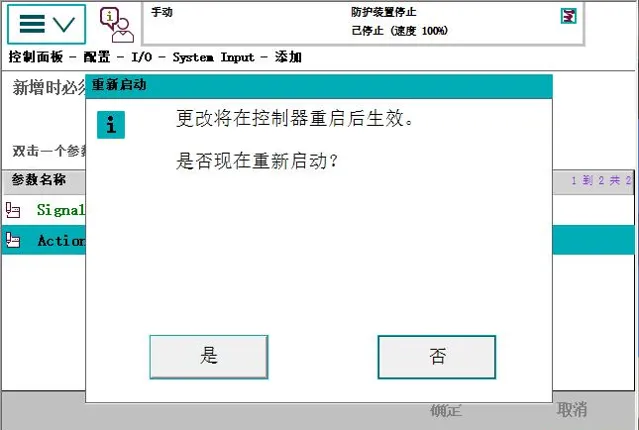
返回系统输入添加界面,点击「确定」,弹出重新启动对话框,点击「否」,如下图所示。
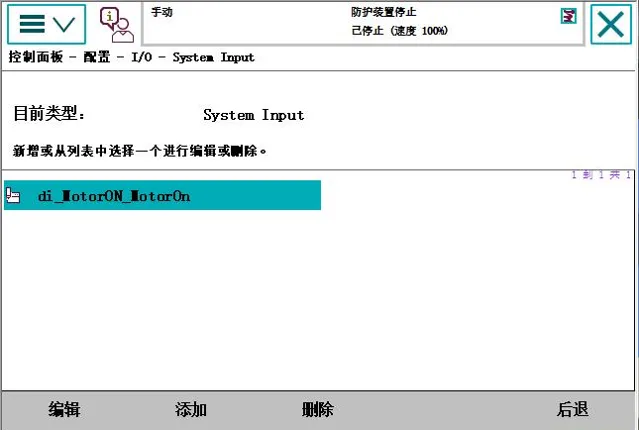
这样,System Input界面的系统输入列表中,就添加了电机开启系统输入与电机开启控制信号的关联关系列表选项,如下图所示。
可以参考上述步骤,继续点击「添加」,来添加其他I/O信号与系统输入的关联关系,有关其他I/O信号与系统输入关联关系的详细说明,如下表所示。
系统输入全部添加完成后,点击「后退」,返回I/O信号配置界面。
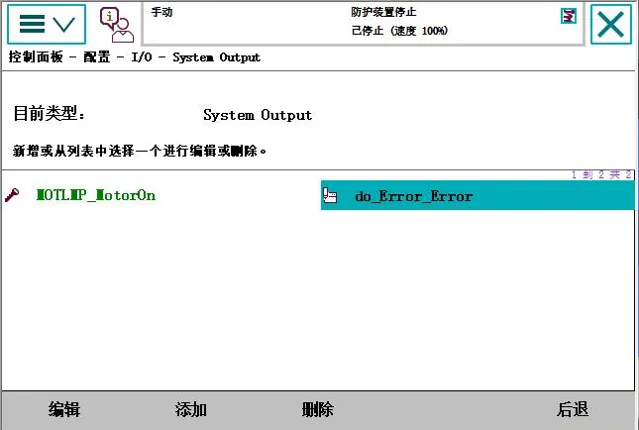
接下来配置系统输出信号,选择「System Output」,点击「显示全部」,如下图所示。

在System Output界面中,点击「添加」,来添加系统输出与I/O信号的关联关系,如下图所示。

进入系统输出添加界面后,双击参数名称「Signal Name」,在其后的值的下拉菜单中,点选「do_Error」,如下图所示。

参数名称下再双击「Status」,进入当前值界面,选择要关联的状态,本案例选择「Execution Error」,如下图所示,点击「确定」。

此时,参数名称栏下会出现Argument2,这表示可以为其指定要监视的任务,当然也可以不指定来监视所有任务。本案例选择指定,双击「Argument2」,在弹出的下拉菜单中点选「T_ROB1」,如下图所示。

点击「确定」,同样会弹出重新启动对话框,点击「否」。这样,System Output界面的系统输出列表中,就添加了程序执行错误系统输出与程序执行错误反馈信号的关联关系系统选项,如下图所示。
可以参考上述步骤,继续点击「添加」,来添加其他I/O信号与系统输出的关联关系,有关其他I/O信号与系统输出关联关系的详细说明,如下表所示。
系统输入输出与I/O信号的关联关系全部配置完成后,重启机器人系统,重启后关联关系立即生效。
外部启动运行测试
在ABB机器人控制柜上,先将模式开关切换到「手动模式」,此时电机应为「防护装置停止」,查看数字输出「do_MotorOn」信号是否为处于脉冲输出状态;将模式开关切换到「自动模式」,查看数字输出「do_AutoOn」信号是否置位;此时电机应为关闭状态,「do_MotorOn」信号复位;置位「di_MotorON」数字输入信号,查看电机是否开启,以及「do_MotorOn」信号是否置位;置位数字输入「di_PpToMain」信号,查看程序指针是否移至主程序;置位数字输入「di_Start」信号,查看机器人是否启动运行,数字输出「do_CycleOn」信号是否置位;置位数字输入「di_Stop」信号,查看机器人是否停止运行,「do_CycleOn」信号是否复位;再次置位「di_Start」信号,查看机器人是否重新启动运行。
测试过程中,每一步操作完成后要及时查看系统是否出现错误报警,若有报警则要及时调试处理。
附录A:系统输入说明
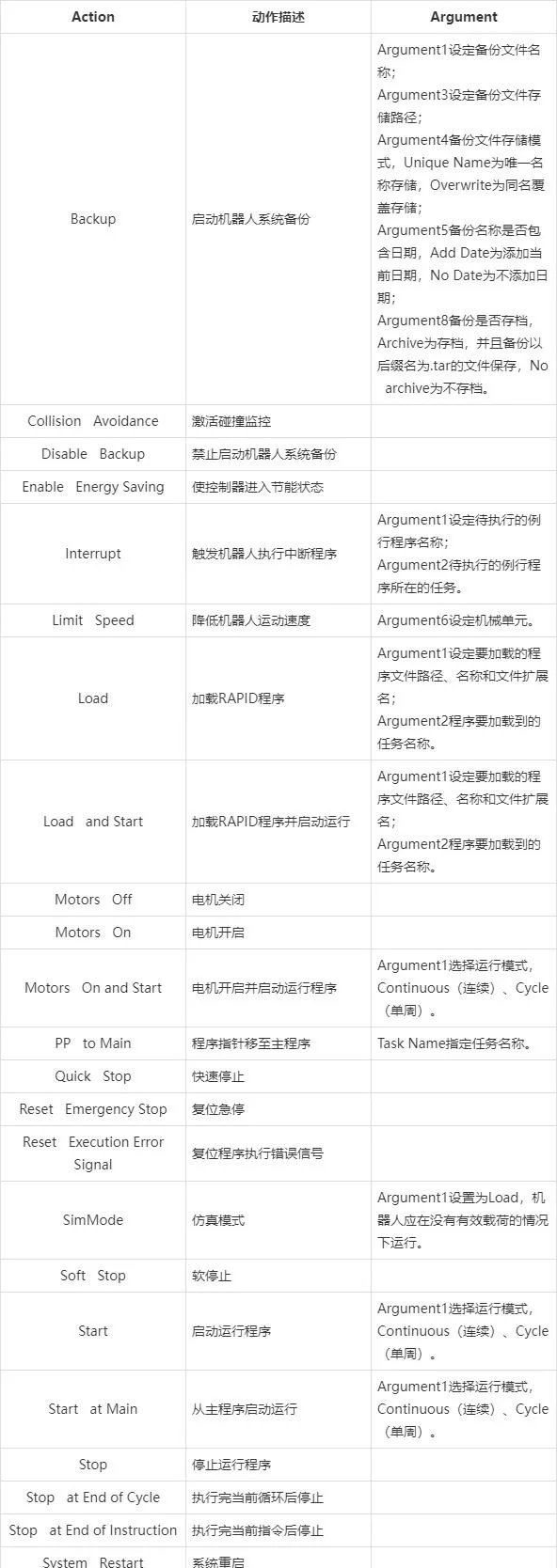
附录B:系统输出说明

The End











