鸟类羽毛复杂的结构可适应机翼变形,这激发了人们对具有高机动性、灵活性和隐身性的羽毛扑翼飞机的兴趣。然而,要在严格的重量限制内模仿鸟类的综合躯体感知仍然具有挑战性。
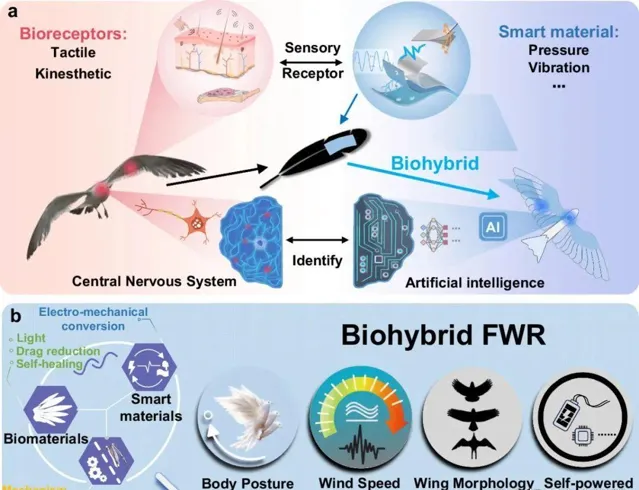
生物混合扑翼机器人系统设计示意图
近日上海交通大学海洋与土木工程学院工程力学系、海洋工程国家重点实验室以及上海交通大学机械工程学院机械系统与振动国家重点实验室开发团队联合打造了一款羽毛-压电生物混合感知方法的扑翼机器人,该机器人具备环境感知和自主飞行能力,不仅具有轻量化、高灵敏度和高精度等优点,还通过模仿鸟类的感知系统,实现了触觉和本体感知的同源融合。
▍ 羽毛-压电生物混合机械传感器设计方法
在设计羽毛-压电生物混合机械传感器时,研究人员巧妙地将羽毛的自然振动结构与压电材料的柔性特性相结合,从而实现了对微妙振动和表面载荷的高灵敏度感知。
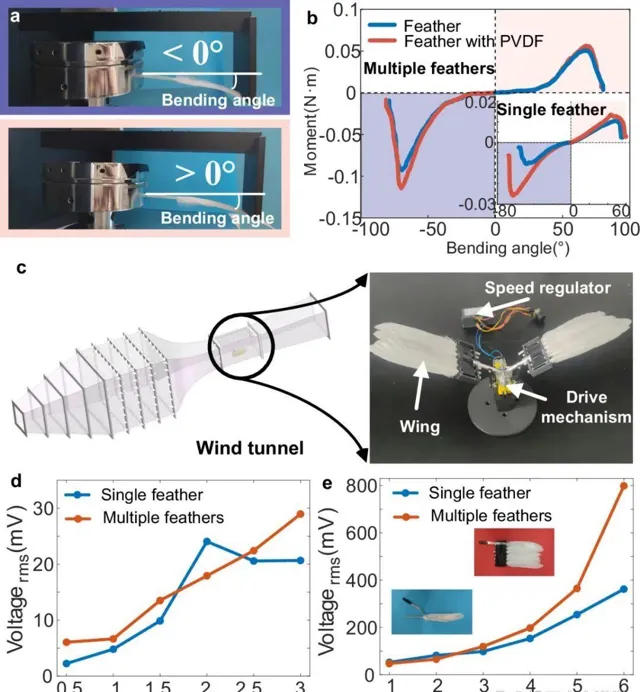
羽毛-PVDF 生物混合机械传感器的机械和电性能测试
在材料的选择上,研究人员使用了鹅的翼羽作为基材,这些羽毛具有独特的层次结构和优良的力学性能。在羽毛的羽轴方向,研究人员固定了多层结构的压电聚偏二氟乙烯(PVDF)薄膜。PVDF作为一种柔性压电材料,能够响应外界压力或振动,并将机械能转换为电能。这种设计使得机械传感器能够感知羽毛上的微小振动,并通过压电效应将这些振动转换为可测量的电信号。
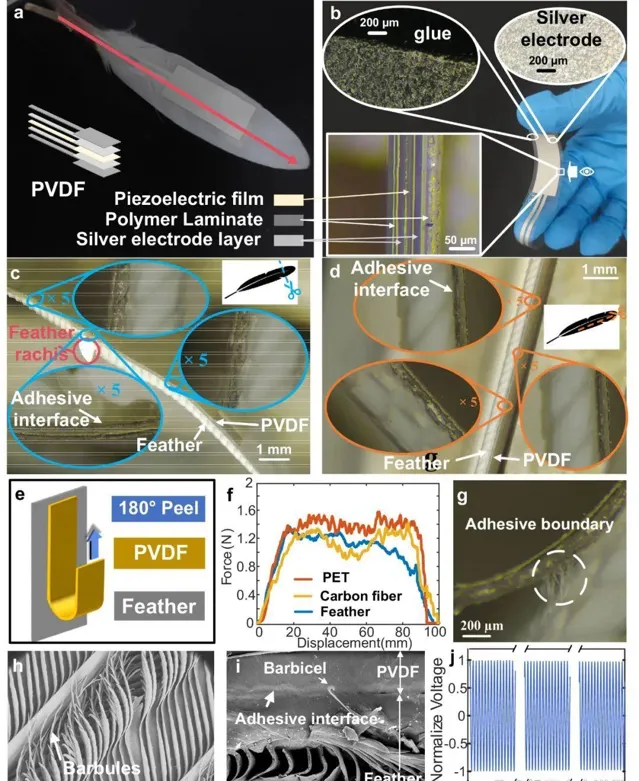
羽毛-PVDF生物混合机械传感器的特性和性能测试
羽毛与PVDF之间的界面连接特性对于机械传感器的性能至关重要。为了确保两者之间的紧密粘附,研究人员对界面进行了微观表征和性能测试。从结果来看,PVDF与羽毛之间形成了紧密的粘附,展现出优异的剥离强度和耐久性。这种优异的界面连接特性不仅保证了机械传感器的稳定性,还提高了其响应速度和灵敏度。
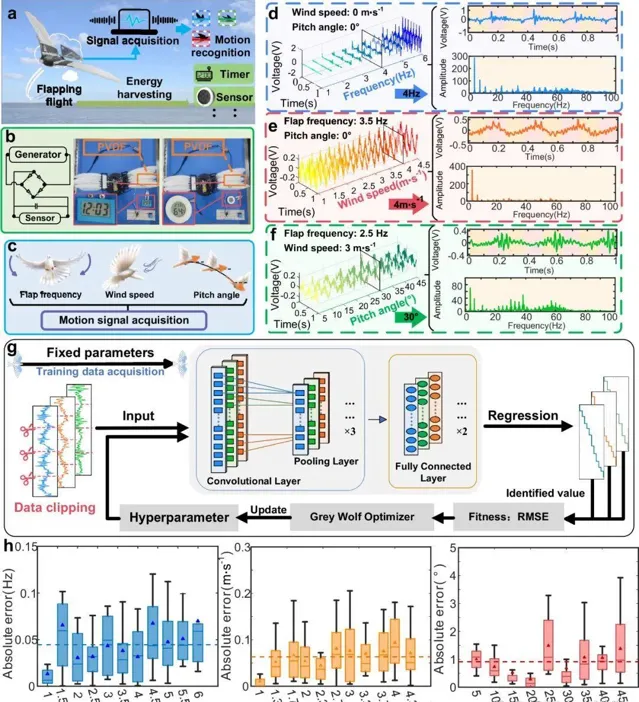
羽毛-PVDF生物混合机械传感器用于体现能量和电压信号采集,以及卷积神经网络-灰狼优化算法用于体现感知识别
在感知算法方面,研究人员采用了卷积神经网络(CNN)和灰狼优化算法(GWO)的组合。卷积神经网络作为一种深度学习模型,具有出色的特征提取能力,能够从复杂的电信号中提取出有用的信息。而灰狼优化算法则是一种基于自然行为的优化算法,能够快速、准确地探索搜索空间,找到最优的网络参数。通过结合这两种算法,研究人员开发了一种高效、精确的感知算法,能够实时识别和可视化扑翼频率、风速、俯仰角和翼形等飞行参数。
▍ 实验验证与结果分析
为了评估羽毛-压电生物混合机械传感器的机械和电气性能,研究人员采用了多项实验进行验证。
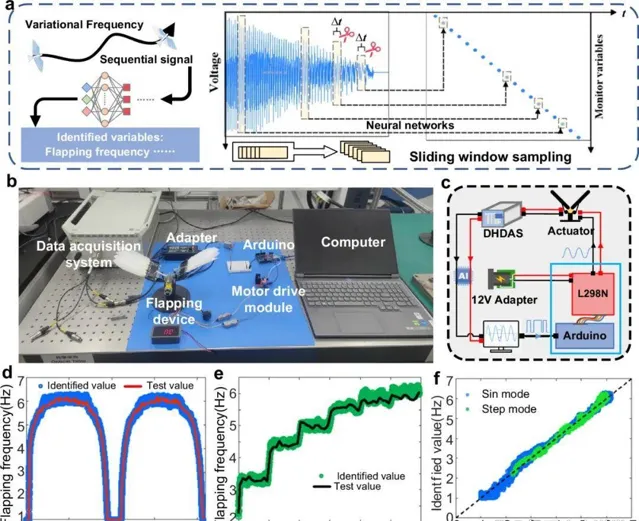
连续时间内频变运动信号识别实验
在弯曲实验中,研究人员分别测试了单个羽毛和多羽毛翼结构在不同弯曲角度下的扭矩-弯曲角度曲线。结果显示,附着有PVDF薄膜的羽毛结构表现出更高的弯曲承载能力,尤其是在下冲程运动中,负向最大扭矩的增强效果更为显著。该实验充分证明,PVDF薄膜的加入显著提高了羽毛结构的机械性能,使其能够更好地承受气动载荷。
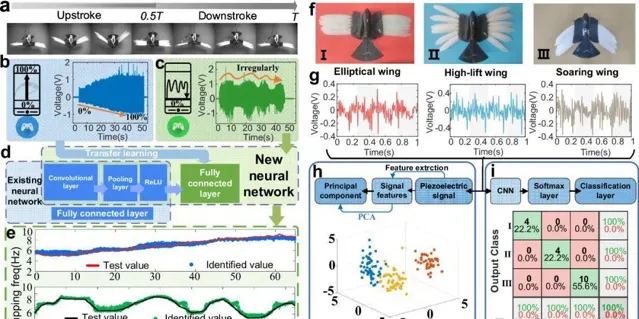
羽毛扑翼机器人的扑翼频率运动和翅膀形态的识别
风洞模拟飞行实验当中,研究人员测量了不同风速和扑翼频率下PVDF的均方根电压。结果显示,随着风速的增加,单个羽毛结构的均方根电压先增加后减少,而多羽毛翼结构的均方根电压则整体呈上升趋势,从分析的结果来看,多羽毛翼结构在风速识别方面更具优势。而随着扑翼频率的增加,两种结构的均方根电压均呈现增加趋势,但多羽毛翼结构在高频下的电压增强效果更为显著。
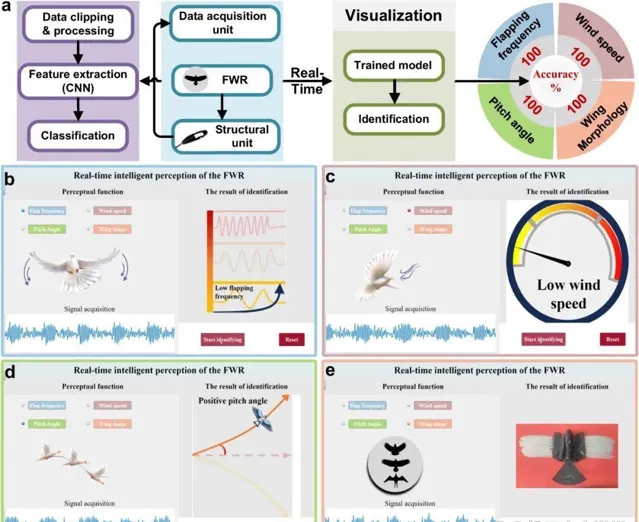
羽毛扑翼机器人实时识别过程、结果及可视化界面
在感知算法验证方面,研究人员利用卷积神经网络和灰狼优化算法对采集的电压信号进行了处理和分析。研究人员首先通过CNN提取信号特征,并利用GWO优化算法找到最优的网络参数。之后采用优化后的CNN模型对飞行参数进行回归识别。结果显示,该算法在扑翼频率、风速和俯仰角识别方面均表现出色,平均绝对误差分别为0.043Hz、0.064m/s和0.910°。这些误差值远低于同类研究中的水平,证明了团队采用的感知算法具有极高的准确性和鲁棒性。
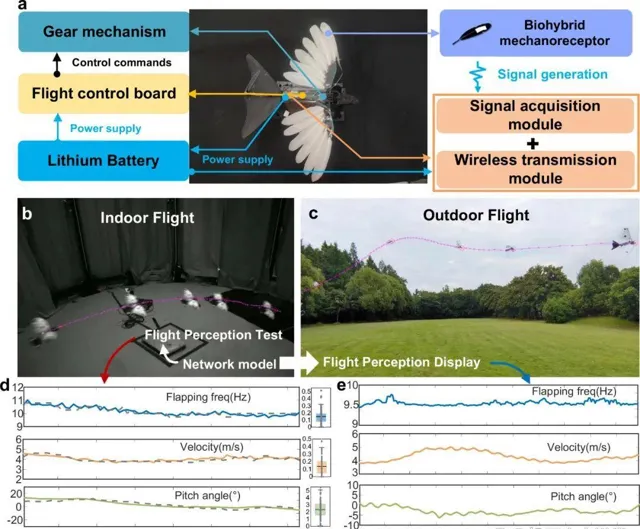
羽翼扑翼机器人的飞行测试
为了进一步验证生物混合感知系统在实际应用中的性能,研究人员在扑翼机器人上部署了该系统,并进行了实时感知测试。研究人员利用高速摄像机和数据采集系统实时收集和分析数据,并通过GUI界面实时显示识别结果。实验结果显示,该系统能够准确地识别扑翼频率、风速、俯仰角和翼形等关键飞行参数,识别准确率高达100%。
此外,研究人员还进行了无绳飞行测试,以评估该系统在实际飞行环境中的性能。研究人员利用运动捕捉系统对飞行轨迹进行实时监测,并将采集的数据与感知系统的识别结果进行对比。结果显示,两者在扑翼频率和风速识别方面表现出高度一致性,俯仰角识别误差也在可接受范围内。充分印证了生物混合感知系统在实际飞行环境中的有效性和可靠性。
▍ 结语与未来:
研究人员表示,随着多模态大模型以及生物混合感知技术研究的深入,扑翼机器人有望在更多复杂环境中实现自主飞行和智能交互。同时,该方法还可应用于鸟类行为监测和生物研究等领域,为生态保护和科学研究提供新的手段。后续团队会持续对轻量级数据采集与传输系统的开发、多功能执行器的设计以及智能算法进行优化,满足多元化场景使用。











