气动人工肌肉(PAM)是一种既柔软又灵活的线性气动执行器,能产生像人体肌肉那样的驱动。这种肌肉执行器能适应各种各样的机器人平台和医疗应用。虽说有好多可能的驱动方案,可还是得研发出一种重量特轻、特别紧凑、特别灵活,还具有高功率重量比的软驱动装置。
【气动人工肌肉】
当下,机器人系统的发展愈发常见,可能的应用有跟人类一同工作的个人或者移动机器人,还有用于恢复或者提升人类能力的外骨骼。因为具有灵活性和柔软性,气动人工肌肉(PAM)在过去的 30 年里,已经成为了市场上其他可用执行器当中一种可能的执行策略。
人工肌肉执行器这个领域跨学科程度很高,把机械工程、材料科学、电气工程、生物学还有物理学领域的好多研究人员都吸引来了。PAM 属于那种简单的机械执行器,是由弹性囊在编织网套里构成的,还带着两个端部配件,用来把肌肉的两头给封住。
气囊被空气加压后,致动器不是收缩就是轴向延伸,这得看编织套管纤维的方向。收缩性的 PAM 能产生比拉伸性 PAM 更大的力,还不容易屈曲。所以,收缩式 PAM 用得更多,也被叫做收缩执行器。
PAM 操作所依据的物理原理和人体肌肉是一样的,原因在于它能把气动功率变成拉力。在人造肌肉里,空气的可压缩性有着难以预测的重要影响。就像图 1 展示的那样,依照不同的工作原理、应用还有设计理念,各种各样的传统 PAM 被开发了出来。
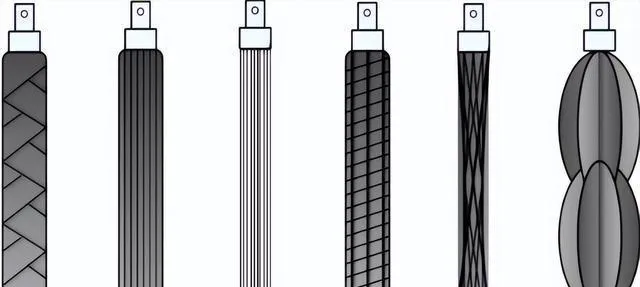
图 1 展示的是 PAM 的类型
气动人工肌肉(PAM)属于靠气压来操作,能收缩以及进行线性运动的执行器。大多数这种执行器主要有两个部分,就是柔性芯以及增强的封闭膜,像外壳和隔膜。这些肌肉执行器的两头都被端部配件(闭合件、夹具)给封闭住了。
核心膜会因为气压的供应向外凸出来或者被挤压,然后靠核心膜把机械动力传给负载。由于会径向膨胀或者收缩,铁芯轴向收缩就对负载产生拉力。所以,PAM 致动器达成的力(像张力、负载这些)和运动是线性的,也是单向的。
得搞明白肌肉执行器的基本概念还有工作原理。这种一膨胀就延伸的收缩操作,能把这些执行器跟波纹管区分开。PAM 在文献里有不少叫法:气动肌肉执行器、流体执行器、流体驱动张力执行器、轴向收缩执行器以及张力执行器。
PAM 最基本的能量主要来自于空气,要么把空气压进去,要么从里面抽取。这样就在肌肉内部的空气和周围环境之间形成了压力差,凭借这个压力差就能启动 PAM 来得到想要的运动。跟低压相比,超压能传递更多能量。大多数 PAM 都是在超压下运作的,环境压力大概是 100kPa,不过也能设计出负压操作的肌肉。
所以,把压缩空气提供给肌肉,就能得到移动负载需要的动作,反过来也是一样,通过把气压释放掉。
【气动人工肌肉分类】
编织肌是由气密的弹性管或者气囊构成的,周边围着编织网(编织、编织、套筒),就像图 2 展示的那样。编织纤维按照一定的角度(螺距角、编织角、编织角)围绕着肌肉的长轴呈螺旋状延展。管子被横向压在套管上,由于纤维的曲率,管子内部的内部压力被编织纤维的张力给限制住了。
纤维张力被加进编织物的端点来平衡外部负载。所以,管和套管之间的挤压式接触对提升负载很必要,而且编织肌肉无法在负压环境下工作。
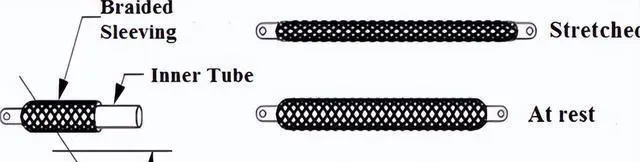
图 2 有关编织肌肉以及它的工作情况
褶皱肌肉执行器是由 Daerden 和 Lefeber 弄出来的,就像图 3 展示的那样。这类肌肉充气的时候,材料应变和摩擦都不掺和进来。这是因为有肌肉膜,这膜在轴向方向上有好多褶皱,是通过把褶皱展开来膨胀的。
另外,平行方向(跟轴垂直)的膜应力一直处在小得能忽略不计的数值,而且会随着折叠次数的增多而变小。
大体上来说,让膜膨胀不需要外部能量,而且因为没有摩擦,滞后现象也没被观察到。这种肌肉的特性取决于全长和最小直径的比例、膜材料的应变情况、收缩率以及施加的压力。
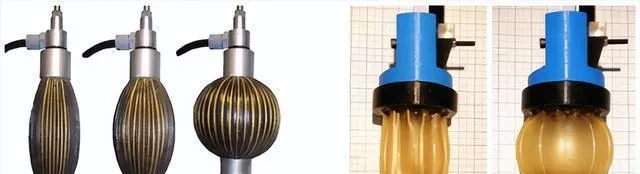
图 3 是褶皱肌肉执行器
编织肌肉与网状肌肉的关键区别在于膜周边网格的密度,这里面有着相对较大孔的网格属于编织物,并且编织得很紧密。
所以,这种膜是拉伸类的,肌肉只能承受低的压力。所以,这类肌肉致动器往往会有个重新排列的隔膜。图 4a 展示了 JMYarlott 的 Yarlott 肌肉,它包含着由一连串绳索或者股线构成的长球形弹性囊。
这致动器膨胀起来是球形囊的样子,一伸长,轴向线就变直,把囊给推成了带有一连串脊和谷的形状。图 4b 展现出了另一种类型的网状肌肉,叫机器人肌肉执行器(ROMAC),是由 G.Immega 和 M.Kukolj 在 1986 年设计的。
ROMAC 是由一个铰接的多叶囊构成的,这个囊被金属丝网固定着,两端是由配件封住的,囊是用护套做的,具有高拉伸刚度、柔韧性和液密性的特点。网或者安全带是由不可拉伸的柔性张力连接件组成的,这些连接件在节点处相连,从而在网络里形成四边菱形的孔。
图 4c 展现出了 M.Kukolj 的 Kukolj 肌肉,这是标准 McKibben 肌肉的改进版。这种肌肉的关键差别在袖子这儿,McKibben 肌肉是紧密编织的辫子,而 Kukolj 的设计采用的是开放式网状网。在没有铅的状况下,网跟膜之间存在着空隙,只有在相当高的延伸负载时这个空隙才会不见。

图 4 呈现的是网状肌肉
在嵌入式的肌肉里,执行器的承载架构被嵌入到它的膜当中。AHMorin 的 Morin 肌肉是由橡胶管和嵌入其中的高拉伸刚度螺纹构成的。螺纹能够沿着致动器的长轴进行排列,或者围绕这个轴排列成双螺旋,而且能采用像棉、人造丝、石棉或者钢这样的纤维材料。
从操作压力的工作来看,在图 5 里呈现了莫林肌的三种设计,像纵向截面展示的超压设计、负压设计以及同心膜设计。HABaldwin 的 Baldwin 肌肉,是依照莫林肌的设计来的,它由弹性膜构成,这弹性膜是特别薄的外科橡胶,还有玻璃丝沿轴向嵌在里面。
K. Nazarczuk 在 1964 年于华沙理工学院搞出来的负压人工肌肉(UPAM),和 Morin 肌肉的设计挺像的。当气体从膜里被吸出去的时候,它不是轴对称地塌下去,意思就是,它在中间被挤压变扁了。

图 5 嵌入到肌肉里
Paynter 针织肌肉是由 HMPaynter 开发的,它有弹性材料做成的球形囊,还靠坚固、坚韧又柔韧的纤维编织结构来加强。完全膨胀的时候,这肌肉就呈现出原始膀胱和编织球体的样子。图 5 展示的是 Paynter 双曲面肌肉,这是 HMPaynter 所描述的另一种设计。
肌肉的弹性膜是用氯丁橡胶或者聚氨酯做的,完全伸展开的时候是旋转双曲面的样子。这膜嵌在套筒里,套筒是由不能延伸的柔性金属线、绳索、聚酯纤维或者对位芳纶纤维制成的,还和端部配件连着。
图 5 展现出了 Kleinwachter 和 Geerk 所设计的 Kleinwachter 扭转装置,在这儿充气膜技术能够拿来设计扭转装置,也就是扭转肌。这个装置存在一个嵌入了加强丝的环形隔膜,它的外边缘与环形结构相连,内边缘则和轴相接。
编织肌肉属于结构紧密的气动人工肌肉,力量输出能力挺强的。就因为它是编织的纤维结构,所以能承受很大的压力,能产生特别强大的力量。但是呢,编织肌肉的制造工艺特别复杂,成本不低,维护和修复也比较难。
褶皱肌肉执行器属于那种外形是褶皱样子的气动人工肌肉。它的柔性跟适应性挺高,能够达成复杂的运动模式。这种执行器响应迅速,不过力量输出比较低,对精确控制的需求也高。
网状肌肉属于那种有着网状结构的气动人工肌肉。它能够达到很高的柔性和自由度,在运动控制方面有着挺高的精确度。不过呢,网状肌肉的制作以及控制比较麻烦,得要更多的气动控制系统还有传感器。
把气动人工肌肉嵌入到其他材料或者结构里,这叫嵌入肌肉。这样能达成紧凑的结构,集成性也更好。但嵌入肌肉的安装与维护挺复杂,得用到特殊的技术和设备。
【气动人工肌肉的应用】
在 20 世纪 80 年代后期,日本东京的普利司通公司造出并销售了首个商用气动人工肌肉(PAM),叫做「Rubbertuators」,还在各种应用里用了一阵子。现在呢,英国的 ShadowGroupofCompanies 以及德国的 FestoAG&Co. 都在生产各种用于工业机器人和医疗应用的 PAM 。
PAM适用于好多地方,像外骨骼、康复辅助,抓取还有处理那些几何形状复杂又精致的东西,还有多种运动很复杂的机器人机构,以及工业和服务机器人。PAM主要在要求合规性和低功率重量比的应用里充当机器人执行器。袖状膀胱肌肉或许能成为假肢中合适的动力系统。
PAM 被用在了各种各样的生物机器人应用里,还有模仿人类以及动物形态和生理学的仿生机器人上。就像图 6 展示的那样。Airbug 这个六足昆虫状的机器人,是 Berns 等人开发出来的。在对抗性排列中运用了流体肌。Jaryani 给出了一系列对抗性人工肌肉驱动装置的动态公式,来产生蛇形机器人平面运动的动作,还有计算肌肉力控制。Ajax 是一款受到蟑螂启发的有腿机器人,如图 6 所示。

图 6 是仿生机器人
气动人工肌肉于医疗领域的应用前景挺广泛的。就因为它有着出色的柔性和可控性,能够用来取代病患或者残疾人的肌肉功能。比如说,在康复治疗的时候,气动人工肌肉能助力瘫痪患者恢复肢体功能。
因为和神经系统相连接,它能够模拟真正的肌肉运动,给予肌肉力量和控制的能力,助力患者重新获得行走、抓握这类基本动作的能力。另外,气动人工肌肉还能用到假肢的设计及制造当中,让假肢更接近自然肢体的运动模式,提高使用者的生活质量。
气动人工肌肉在机器人技术里的应用可重要啦。一般来说,机器人得跟环境打交道,而气动人工肌肉能够让机器人拥有跟人类肌肉差不多的动作水平和柔韧性。有了气动人工肌肉,机器人就能更灵活地去做各种事儿,像抓取、搬运还有操作之类的。
另外,气动人工肌肉能够用在机器人外骨骼的设计方面,让机器人的力量和运动能力变得更强。就像在救援任务里,配备了气动人工肌肉外骨骼的机器人能够承担危险和重任,帮着人类做好各类艰苦的工作。
气动人工肌肉在人机交互这一领域有着很重要的地位。人机交互技术不断发展,这就需要机器能更好地明白和回应人类的意图以及指令。凭借气动人工肌肉,机器能够更自然地效仿人类的动作,跟人类展开更直观、更高效的交互。
比如说,在虚拟现实跟增强现实技术里,气动人工肌肉能拿来模拟身体的运动以及触感反馈,让用户能更真切地感受虚拟环境。另外,气动人工肌肉还能用到智能助理和机器人陪伴系统当中,给人提供更自然、更亲近的人机交互感受。
不过呢,虽说气动人工肌肉的应用潜力特别大,但是当下还是有一些难题和限制。这当中有一个就是控制系统太复杂。气动人工肌肉的活动得进行精准的控制和协调,这样才能跟人类肌肉的运动模式一样。
所以,研发高效、稳定且精准的控制算法与系统属于重要的研究方向。另外,气动人工肌肉的制造材料以及结构设计也得持续优化,让其可靠性、耐用性和适应性得到增强。
未来的气动人工肌肉会朝着更高的性能和效能努力。依靠改进材料性能与制造工艺,让气动人工肌肉能承受更大的力和压力,还能一直保持不错的柔性与可控性。另外,把气动系统和控制算法优化好,提升肌肉的响应速度与精确度,让它更适合复杂的运动任务。
未来的气动人工肌肉会更看重自适应和智能化这方面。依靠集成传感器以及反馈机制,让气动人工肌肉可以实时察觉并适应环境的改变,进而更出色地完成任务。与此同时,把机器学习和人工智能技术引进来,促使气动人工肌肉能够去学习并优化运动模式,慢慢达成自主控制和智能决策。
未来的气动人工肌肉会朝着小型化和微型化的方向发展。由于微纳技术不断进步,能在微尺度上生产气动人工肌肉,让其能够在微型机器人、医疗器械等方面得以运用。这会大大增加气动人工肌肉的应用领域,给微型设备的发展带来新的推动力。
未来,气动人工肌肉会跟可穿戴技术以及人体增强融合起来。把气动人工肌肉用到智能服装、外骨骼还有人体增强的设备里,能够让人体的力量、灵活性以及运动能力变强。这对提高工作效率、进行康复治疗还有日常生活的方便性都有帮助。
气动人工肌肉的发展得靠多学科融合与合作应用才行。像工程学、材料科学、控制科学、生物学等好多领域的专家都得一起研究、开发气动人工肌肉,这样才能促进它的技术进步,让应用更广泛。
另外,跟其他技术以及系统相融合也会变成发展的关键走向,像是和人工智能、虚拟现实、生物医学等方面的技术相结合,一块儿达成更多样、更高效的应用。
未来气动人工肌肉的发展会朝着高性能、自适应、小型化、可穿戴以及多学科融合这些方向去走。这能给医疗、机器人技术、人机交互等方面带来更多的创新与突破,给人类的生活还有科技进步贡献更大的力量。
参考文章:Kalita、B.;Leonessa、A.;Dwivedy、S.K. 所著的【关于气动人工肌肉执行器发展的综述:力模型及应用】。Actuators 2022,11,288. https://doi.org/10.3390/act11100288











