无形的"粘液"机器人可以改变形状来完成复杂的任务--这听起来像是科学幻想。然而,麻省理工学院的研究人员已经开发出一种机器学习技术,使形状可变的软体机器人离现实更近了一步。
1991 年,邪典电影【终结者 2:审判日】(Terminator 2: Judgment Day)中的 T-1000 向世人展示了可变形机器人的概念。从那时起(如果不是在此之前的话),许多科学家都梦想着创造一种能够改变形状的机器人,以执行各种任务。
但是,麻省理工学院的一个研究小组正在努力开发能够做到这一点的机器人。他们开发了一种机器学习技术,可以训练和控制一种可重新配置的"粘液"机器人,这种机器人可以挤压、弯曲和拉长自己,从而与周围环境和外部物体进行互动。遗憾的是,这个机器人不是由液态金属制成的。
麻省理工学院计算机科学与人工智能实验室(CSAIL)的陈博源(Boyuan Chen)是概述研究人员工作的研究报告的共同作者,他介绍说:"我们的机器人就像粘液一样,可以真正改变自己的形态。我们的方法效果如此之好,非常令人震惊,因为我们面对的是一种非常新的东西"。
研究人员必须设计出一种方法来控制粘液机器人,这种机器人没有手臂、腿或手指,也没有任何骨架供其肌肉推拉,更没有任何固定位置的肌肉致动器。如此无形的形态,如此无尽动态的系统......这些都是噩梦般的场景:你究竟该如何为这样一个机器人的动作编程呢?
显然,在这种情况下,任何标准的控制方案都将毫无用处,因此研究小组求助于人工智能,利用其处理复杂数据的巨大能力。他们开发出了一种控制算法,可以学习如何移动、拉伸和塑造所述球状机器人,有时还可以多次学习,以完成特定任务。
粘液机器人没有固定的"骨架"或执行器位置,因此具有极高的灵活性,但同时也是对控制系统的巨大挑战 麻省理工学院
强化学习是一种机器学习技术,用于训练软件利用试验和错误做出决策。它非常适合训练具有明确运动部件的机器人,例如带有"手指"的抓手,可以对使其更接近目标的动作进行奖励--例如捡起一个鸡蛋。那么,由磁场控制的无形软体机器人呢?
"这样的机器人可能有成千上万块小肌肉需要控制,"陈说。"因此,用传统方法学习它非常困难。粘液机器人需要一次移动大块粘液,才能实现有效的功能性形状变化;操纵单个颗粒不会产生所需的实质性变化。因此,研究人员采用了一种非传统的强化学习方法。
在二维行动空间中,相邻行动点之间的相关性更强,从而使软机器人的形状发生变化
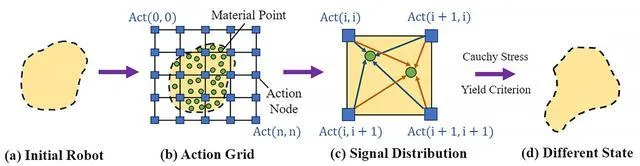
在强化学习中,当一个代理与环境交互时,可供选择的所有有效行动或选择的集合被称为"行动空间"。在这里,机器人的行动空间被视为由像素组成的图像。他们的模型使用机器人所处环境的图像来生成一个由网格覆盖的点所构成的二维行动空间。
与图像中邻近像素的关联性相同,研究人员的算法认为邻近的动作点具有更强的关联性。因此,当机器人的"手臂"改变形状时,其周围的动作点会一起移动;"腿"上的动作点也会一起移动,但与手臂的移动不同。
研究人员还开发了一种"从粗到细的策略学习"算法。首先,使用低分辨率的粗略策略(即大块移动)对算法进行训练,以探索行动空间并识别有意义的行动模式。然后,更高分辨率的精细策略深入研究,优化机器人的行动,提高其执行复杂任务的能力。
团队利用人工智能强化学习技术创建了一个基于任务、以目标为导向的控制系统
"从粗到细意味着,当你采取一个随机动作时,这个随机动作很可能会产生不同的结果,"该研究的合著者、同样来自CSAIL的文森特-西茨曼(Vincent Sitzmann)说。"结果的变化很可能非常显著,因为你同时粗略地控制了几块肌肉"。
接下来是测试他们的方法。他们创建了一个名为"DittoGym"的模拟环境,其中有八项任务可以评估可重构机器人改变形状的能力。例如,让机器人匹配一个字母或符号,并让它生长、挖掘、踢、抓和跑。
"我们在 DittoGym 中的任务选择既遵循了通用的强化学习基准设计原则,又满足了可重构机器人的特殊需求。"
"每项任务的设计都代表了我们认为重要的某些特性,例如通过长视野探索进行导航的能力、分析环境的能力以及与外部物体交互的能力,"Huang 继续说。"我们相信,这些任务加在一起可以让用户全面了解可重构机器人的灵活性以及我们的强化学习方案的有效性。"
研究人员发现,就效率而言,他们的"从粗到细"算法在所有任务中的表现都优于其他算法(例如,仅使用粗算法或从零开始使用细算法)。
要想在实验室外看到形状可变的机器人尚需时日,但这项工作是朝着正确方向迈出的一步。研究人员希望,这将激励其他人开发出自己的可重构软体机器人,有朝一日,这种机器人可以在人体上行走,或被集成到可穿戴设备中。
该研究发表在预印本网站arXiv上。











