前言: 前不久粉丝陆先生分享了些资料,今天先把人形机器人的相关行业资料整理出来,供各位小伙伴参考。这些报告主要是介绍投资方向的,大家以后也可以关注下这些领域,特别是机器人研发中的核心部件,小而精。
一、人形机器人的国产供应链机遇
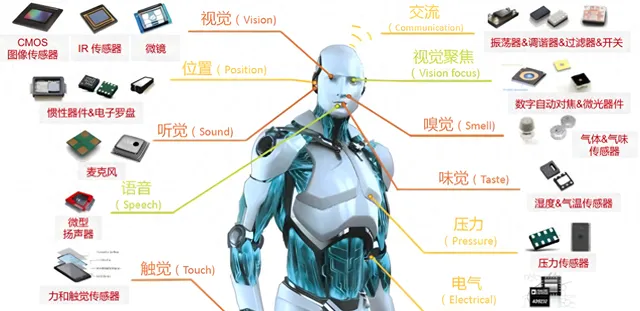
这份报告主要介绍了机器人的上下游供应商和核心关键零部件。人形机器人产业链可以分为软件生态和硬件产业链两大类。软件生态主要包括系统集成商自研的机器人算法和人工智能算法等。硬件产业链,可分为动力总成系统、智能感应系统、结构件及其他部件。动力总成系统包括电池系统、伺服电机、减速器、滚柱丝杠、控制器等;智能感应系统包括软件、芯片、传感器等。在硬件产业链中,核心部件包括谐波减速器、滚柱丝杠、伺服电机和传感器等。
1、下面是以特斯拉Optimus擎天柱机器人为例:

2、机器人产业图谱—核心硬件、系统与技术支持、本体制造&系统集成

3、机器人行业发展历程:诞生于实验室,工业机器人先行,走向具身智能

4、经典人形机器人对比

二、人形机器人发展与展望
主要介绍了人形机器人产业的进展,核心零部件和硬件等传感器介绍
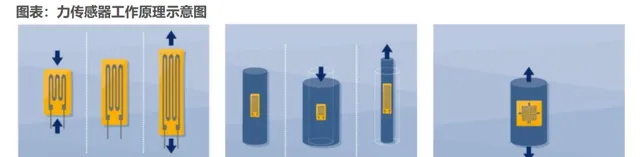
1、力传感器
力传感器是人形机器人产业链中的关键硬件部件,可分为应变式力传感器、光学式传感器和压电式力传感器。作为机械、电子、算法和计量融合的复杂交叉学科,力传感器具有较高的技术壁垒。多维力传感器能够实现更精细的工作需求,提高人形机器人的工作效率和安全性。力传感器的重要部件包括弹性体和应变片,其中弹性体制造质量直接影响传感器的测试性能指标。
2、视觉传感器
机器视觉系统是指用计算机来实现人的视觉功能,即用计算机来实现对客观的三维世界的识别。

3、惯性导航IMU
IMU 传感器:个 IMU 通常包含三个轴向的陀螺和三个轴向的加速度计,以测量物体在三维空间中的角速率和加速度。人形机器人借助实现定位、平衡及姿态检测。

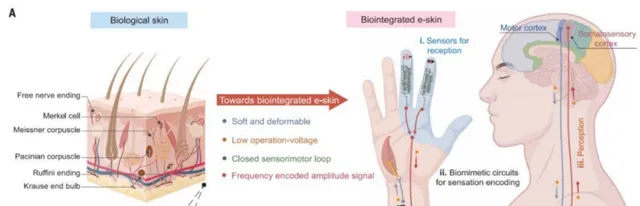
4、电子皮肤
电子皮肤是一种柔韧、可拉伸且具有自我修复能力的电子产品,它能模仿人类或动物皮肤的功能。电子皮肤具有感知能力,能重现人类皮肤响应环境因素变化的能力,例如对热量和压力变化的反应。它为机器人提供了精细的力学反馈,帮助机器人完成准确的抓握和操纵任务。
5、减速器
主要包括行星减速机、谐波减速机等。
(1)行星减速器是一种用于动力传输的机构,通过齿轮的速度转换器,将马达的回转数降低到所需的回转数,并提供较大的转矩。其优点包括体积小、重量轻、承载能力高、使用寿命长、运转平稳且噪音低。行星减速器具有功率分流和多齿啮合的独特特性。其主要传动结构包括行星齿轮组、太阳齿轮组和内齿环。

(2)谐波减速器是人形机器人的重要核心零部件,常用于原动件与工作件之间的减速传动装置,起到匹配转速和传递扭矩的作用。谐波减速器具有体积小、重量轻的优点,因此是人形机器人的优质选择。常见的减速器还有RV减速机等。

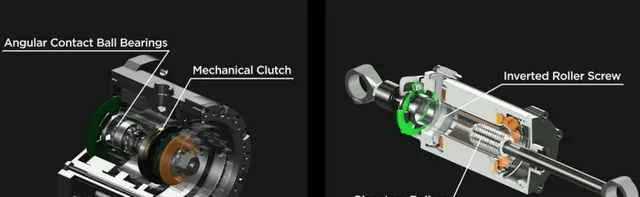
6、丝杠
丝杠是一种广泛应用于机械传动中的部件,具有滑动摩擦系数较小、高效率、长寿命、可逆转和易于控制的特点。根据其摩擦特性,丝杠可分为滑动丝杠、滚动丝杠和静压丝杠。在实际应用中,导轨与丝杠成套运行,用于实现支撑和导向功能。常见的导轨种类包括滑动导轨、滚动导轨和静压导轨等。
7、电机
电机是机器人的核心部件,常见的分类有直流与交流电机、有刷与无刷电机、同步与异步电机。其中,空心杯电机是一种直流永磁伺服电动机,适用于机器人的手指执行器,满足轻量化、高精度等需求。直驱电机也是一种重要的电机类型,可以直接驱动,无需经过传动装置,分为旋转直驱电机和直线直驱电机。直驱电机具有刚性高、系统控制带宽高、响应迅速、精度高、能源效率高、维护工作量少、可靠性高等优点,适用于部分承力较大、需要大扭矩的关节。

参考资料汇总:
1、国海证券-机器人系列专题报告_人形机器人的国产供应链机遇
2、民生证券-人形机器人发展与展望_天工人巧日争新












