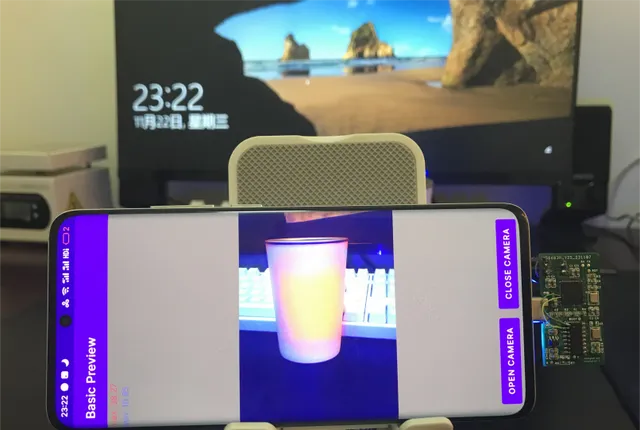
一块小小的免费PCB,就能 让手机秒变热成像仪 !
还是贼拉 高清 的那种!
总开发成本也就100元左右!

这不得围观一下!
一、开源描述
抛开了传统的热成像仪制作方式,使用 可见光camera 和 热成像传感器 制作了一个 双目手机热成像仪 。像素:640x480。

目前,项目已全开源。
——这个热成像仪的 设计原理 是什么? 电路 如何设计? 软件 如何设计?使用了什么算法和技巧?
下面一一进行分析!
二、项目功能实现原理
了解功能原理前须知:
热成像仪,为什么要设计成「双目」的?
使用可见光图像来补偿热成像图像,就可以达到热成像图—— 质量高、分辨率高 的效果。
那具体的功能实现是怎样的?下面就分析一下!
本项目整体功能框架图如下。

首先MCU通过I2C接口 读取热成像传感器 数据,通过USB接口 传向USB Hub 。
Camera 通用免驱USB摄像头,也 接到USB Hub上面 。
然后将Usb Hub和Android手机连接。
接着,Android手机的应用层就会获取到两个传感器的数据。
通过一定算法进行融合,就能得到——分辨率较高、质量较好的热成像图!
这是 热水壶 热量分布图:
这是 白天公园 的热量分布图:
这是 夜间街道 的热量分布图:
想实现这样的效果,软硬件该如何设计呢?
三、硬件设计原理
原理图

PCB图
本章会将原理图拆分为5部分,一一说明一下。
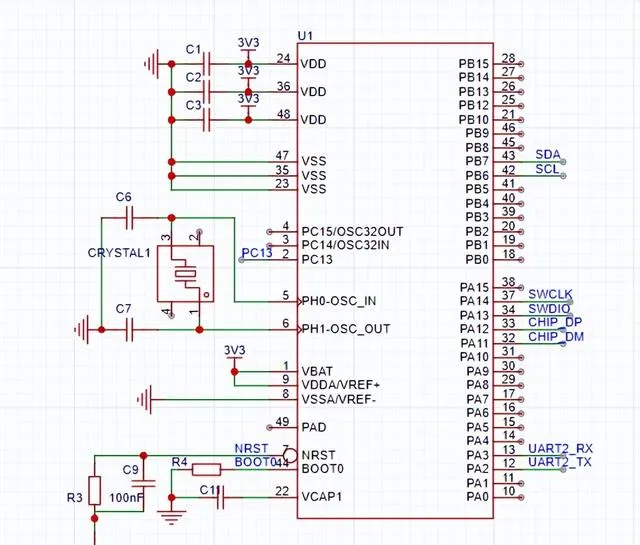
1.MCU
MCU使用的是STM32F411CEU6,带USB FS,其带浮点运算单元可对热成像数据进行解算。
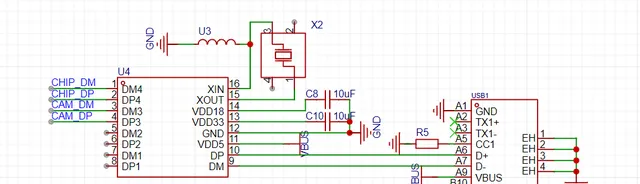
2.USB Hub
USB Hub使用的是SL2.1A,支持USB HS,可以用于传输摄像头数据。此处接了晶振,可不焊接。
Camera则通过焊接方式连接到CAM_DM/CAM_DP。
USB1是一个USB TypeC公头,用于连接手机。
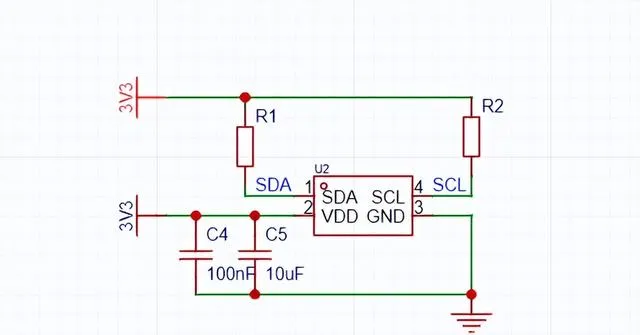
3.热成像传感器
热成像传感器使用的是MLX90640。
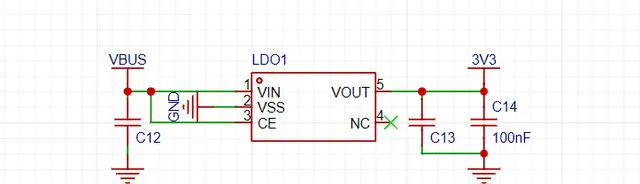
4.电源
电源这里直接使用了一块LDO进行稳压,型号是ME6211。
这 可以 直接用低ESR的陶瓷电容 进行输入输出的稳压 。
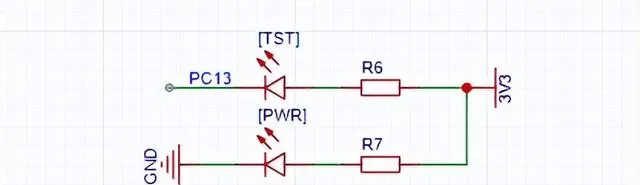
5.其他
电源灯和测试LED电路:
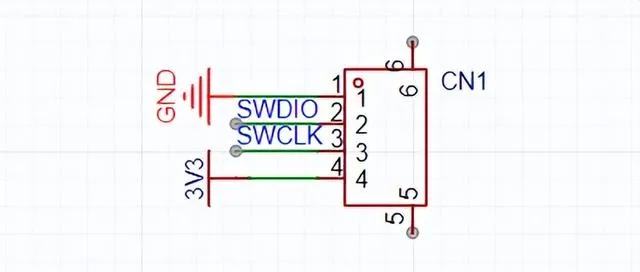
调试SWD接口:
测试点,固件使用UART2作为Debug串口:
完成了硬件部分的设计,咱们再深入剖析一下,软件部分的核心算法是什么!
四、软件设计原理
软件部分,将重点分析——软件设计思路、Android APP设计、数据融合算法,这三个部分。
1.软件设计思路
开发环境使用STM32CubeIDE。
软件整体设计框架图如下:
通过I2C从mlx90640读取数据,进行打包,再使用USB发送读取到的数据。
整个过程使用一个循环即可。
其中mlx90640的 温度测量范围是 -40到300摄氏度 。
值得注意的是:
温度测量范围需要保留两位小数,转换为整型为-4000到30000,也可以用16位整型覆盖,使用一个0x8000为起始码,后续跟768个温度数据。
mlx90640官方已经提供驱动, 只需要实现对应I2C的读写操作 ,即可通过API来读取传感器数据。
USB库由CubeIDE自动生成 ,直接调用USBCDC发送数据即可。
2.Android APP
Android端主要负责——数据读取、融合和显示功能的实现。
这里有两个USB设备:
①软件框架
Camera和热成像传感器的数据读取都有对应的库支持。
由于两个库对数据的读取都是用的异步回调的方式,因此这里采用双buffer缓存的机制
就以Camera为例,解析一下数据读取的逻辑:
初始化一个长度为2的队列 。回调发生时,就新申请一块buffer,然后将YUV数据拷贝到这块buffer中,再将这块buffer放入队列。
再 起一个线程 ,不断从队列中读取数据,用于数据融合。
如果线程读取太慢 ,回调发现队列已经满,则从队列中取出一块buffer丢弃,然后再将新的buffer放入队列。
如果回调一直不来 ,线程队列为空,则跳过下一次再读取。因为每一次回调都会新申请一块buffer,因此buffer不存在并发问题。
队列添加和删除 访问的都是同一个数据结构,存在并发问题, 操作时需要注意上锁 。
如上所述,Camera有两个队列:
只通过一个线程来访问两个队列。两个队列都有数据时才取出,并进行数据融合。
由此我们得出,软件总体运行流程如下:
②Camera数据读取和预览
Android对摄像头的支持使用 UVCAndroid 。
该库基于saki4510t/UVCCamera开发,提供了更为简单的接口。
③热成像数据读取和预览
热成像数据通过USBCDC传输,在Android端看到的是一个虚拟串口。
Android开发环境中,主要使用 felHR85/UsbSerial 提供虚拟串口的操作支持,并在回调中将热成像数据放入队列中。
3.数据融合
上面提到过多次「数据融合」。
那么,要如何获取数据,并进行融合呢?
①获取数据
使用一个线程即可获取数据。
这里预计可见光相机的帧率会比热成像帧率更高。
因此在等待mYUVQueue队列有数据时才会进行数据融合。
当 mThermalQueue 没有数据时,则默认使用上一帧的数据。
②融合算法
这里摄像头采集的是可见光的图像,分辨率是640x480;
热成像采集的是温度分布,分辨率是32x24。
融合算法的目的是 ——通过参考可见光的图像, 让热成像采集的温度图像 分辨率更高, 拥有更多的细节 。
该算法基于一个假设: 颜色相近的像素,大概率来自同一个物体,对应的温度也应该相近。
该算法的流程如下:
将热成像温度的分布,通过线性插值扩大到640x480像素。
以当前像素点为中心,选定一个长宽为REF_LEN的方形区域。
计算系数矩阵,系数表示每个像素的权重。
计算估计值矩阵,表示每个像素相对于当前像素温度的估计值,t_hat_i = k_i * t_i。
计算估计值矩阵的平均值,即当前像素的温度估计值。
由以上算法可知,在参考值矩阵中,与当前像素值 色度差值越小 ,对应的 系数k_i也就越大 ,对应 温度的估计值也就越大 ,对应的估计的 温度也就越接近 。
举个栗子。
使用如下两个图片进行本地仿真。
第一张 是 camera拍的 图片, 第二张 是 热成像获取的 经过插值放大后的温度分布图片。分辨率均为640x480。
当REF_LEN = 4时,融合结果如下:
当REF_LEN = 7时,融合结果如下:
可见, 加入融合算法之后 ,原本插值放大的低频信息中, 多出了一些高频细节 。
色彩映射
完成一个热成像仪的最后一步,就是将融合后的图像转为伪彩色,再按照YUV的方式映射到camera图像中。
最终效果如下:
因为色彩映射的原因,原本热成像融合出的高频细节被淹没在海量的camera图像细节中,因此图像融合算法的效果并不明显,后续可能会分为两种模式分别进行输出。
参考资料:
[1]https://oshwhub.com/colourfate/binocular_thermal_imager
— 完 —
嘉立创EDA·头条号
关注我,看一手优质开源项目











