刘智勇, 温昌凯, 肖跃进, 付卫强, 王昊, 孟志军. 拖拉机-牵引式农机具路径跟踪控制算法研究[J]. 智慧农业(中英文), 2023, 5(4): 58-67.
LIU Zhiyong, WEN Changkai, XIAO Yuejin, FU Weiqiang, WANG Hao, MENG Zhijun. Path Tracking Control Algorithm of Tractor-Implement[J]. Smart Agriculture, 2023, 5(4): 58-67.
官网全文免费阅读
知网阅读
拖拉机-牵引式农机具路径跟踪控制算法研究
刘智勇
1,2
, 温昌凯
2,3
, 肖跃进
2,3
, 付卫强
2,3
, 王昊
2,3
, 孟志军
1,2,3*
(1.江苏大学 农业工程学院,江苏镇江 212013,中国;2.国家农业智能装备工程技术研究中心,北京 100097,中国;3.智能农业动力装备全国重点实验室,北京 100097,中国)
摘要:
[目的/意义] 本研究为解决牵引式农用车辆的路径跟踪精度低、迟滞性大和抗干扰能力差等问题,提出了一种基于滑模变结构控制的拖拉机-牵引式农机具路径跟踪方法。
[方法] 建立了拖拉机-牵引式农机具运动学模型,通过近似线性化的方法建立了车辆-道路偏差状态方程,采用Ackermann公式进行极点配置,设计基于指数趋近律的滑模变结构控制器,并在MATLAB/Carsim联合仿真环境中进行跟踪仿真分析。
[结果和讨论] 跟踪双移线参考路径时,农机具横向偏差和航向偏差经8 s收敛到0 m和0°,在参考航向变化时,横向偏差小于0.1 m,航向偏差小于7°;在跟踪圆形参考路径时,农机具横向偏差经过7 s趋于稳定,并始终小于0.03 m,农机具航向偏差经7 s趋于稳定,并保持在0°;在跟踪S形曲线参考路径时,农机具在曲率变化处依然保持着良好的跟踪性能。
[结论] 农机具能有效跟踪参考路径,满足精度和快速性的要求。在跟踪仿真试验中,拖拉机前轮转角和拖拉机与农机具间的铰接角都保持在小范围内,符合实际生产的需要,降低安全事故发生的可能性。
关键词: 牵引式农机具;运动学模型;滑模变结构控制;路径跟踪;仿真试验
文章图片
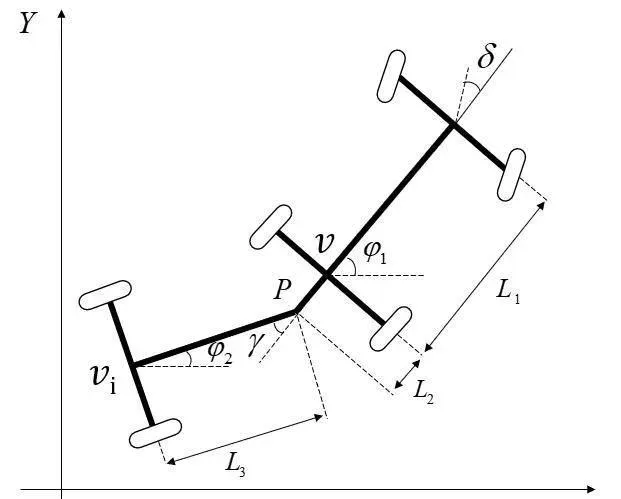
图1 拖拉机-牵引式农机具运动学模型
Fig. 1 Kinematic model for tractor-implement

图2 车辆-道路偏差模型
Fig. 2 Vehicle-road deviation model
图3 符号函数和饱和函数下的车辆前轮转角输出
Fig. 3 Vehicle’s front wheel angle output under symbol function and saturation function

图4 仿真试验的车型选择
Fig. 4 Vehicle model selection of simulation test
图5 车辆路径跟踪控制器模型
Fig. 5 Vehicle path tracking controller model

图6 MATLAB/Carsim联合仿真环境
Fig. 6 MATLAB/Carsim co-simulation environment
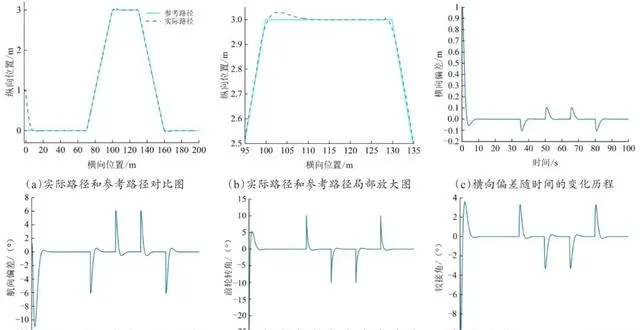
图7 车辆的双移线路径仿真结果
Fig. 7 Simulation results of vehicle’s double lane change
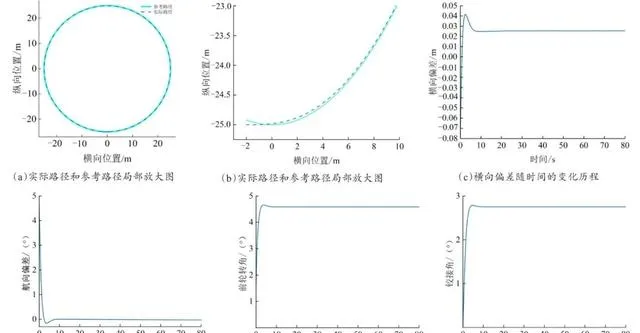
图8 车辆的圆形路径仿真结果
Fig. 8 Simulation results of vehicle's circular path
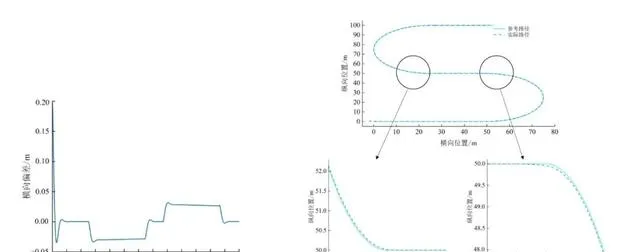
图9 车辆的S形曲线路径仿真结果
Fig. 9 Simulation results of vehicle's s-curve path
通信作者简介

孟志军 研究员
孟志军,北京市农林科学院智能装备技术研究中心研究员,智能农业动力装备全国重点实验室副主任,博士,博士生导师。主要从事农机自动驾驶、精准农业智能控制和农机大数据等领域的研究开发和应用工作。先后主持国家重点研发计划、国家自然科学基金、863计划等科研项目20余项,发表学术论文129篇,获授权国家发明专利21项。国家「万人计划」科技创新领军人才,获国家科技进步二等奖2项,北京市科技进步一等奖、中华农业科技奖一等奖等省部级科技奖励5项,先后获中国农业机械学会青年科技奖、中华国际科学交流基金会杰出工程师奖等。兼任中国农业机械学会常务理事、全国农机化科技创新专业组专家。

来源:【智慧农业(中英文)】2023年第4期
转载请联系编辑部授权
本期支持单位
潍柴雷沃智慧农业科技股份有限公司
淄博数字农业农村研究院
上海赞奇文化科技有限公司

智慧农业微信交流服务群
为方便农业科学领域读者、作者和审稿专家学术交流,促进智慧农业发展,为更好地服务广大读者、作者和审稿人,编辑部建立了微信交流服务群,有关专业领域内的问题讨论、投稿相关的问题均可在群里咨询。 入群方法: 加小编微信 331760296 , 备注: 姓名、单位、研究方向 ,小编拉您进群,机构营销广告人员勿扰。

发布征集

欢迎在我公众号发布科研团队介绍、创新科研成果及相关活动等信息。