在科幻電影【超能陸戰隊】中,我們見證了一種由成千上萬個微小磁性單元組成的機器人透過磁力相互連線,形成各種復雜的三維結構。香港中文大學(深圳)林天麟教授團隊致力於將這一科幻轉化為現實,近年來開發了一系列自由形態模組化自重構機器人(相關報道:港中深「新型自重構機器人」獲IROS最佳機器人設計提名、【超能陸戰隊】成真?香港中文大學(深圳)自由重構機器人再升級)。
近日, 林天麟教授團隊進一步將研究擴充套件到模組化自重構機器人在戶外非結構化環境中的實際套用。他們的最新研究成果「Snail-inspired robotic swarms: a hybrid connector drives collective adaptation in unstructured outdoor environments」於今年4月發表在【自然通訊】(Nature Communications)雜誌上。

▍自然啟發的蝸牛機器人集群
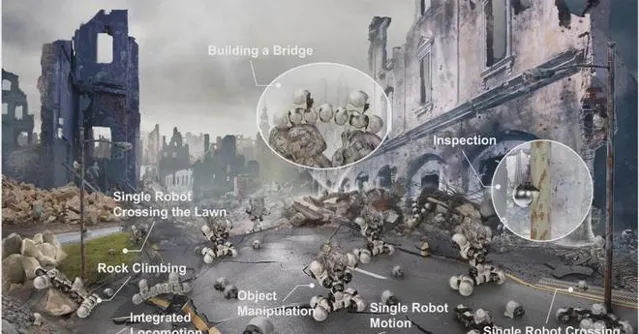
機器人集群的設計常常受到自然界中群體行為的啟發,例如魚群、螞蟻群和鳥群的協同行動。這些生物能透過團隊合作完成復雜的任務,這種現象被稱為「群體智慧」。群體智慧使得這些生物能在多變的環境中展現出卓越的適應力、穩定性和高效率。借鑒自然界的這些原理,科學家們試圖開發能在空中、水中和陸地上活動的機器人集群,模仿這些自然界的群體行為。然而,多數地面可重構機器人集群仍主要在相對簡單的室內環境中執行,它們在真實世界的套用仍然面臨限制。
在這種背景下,研究人員提出了一種創新的解決方案,實作了模組化自重構機器人在戶外非結構化環境的套用,其設計靈感來源於陸地蝸牛的形態和其獨特的連線機制。這種新型機器人系統不僅能適應復雜的戶外環境,還具備極為穩固的連線機制,確保機器人在組合時能保持極高的穩定性。這項研究為地面機器人集群在非結構化環境中的套用提供了新的可能性,推動了這項技術在真實世界條件下的發展。
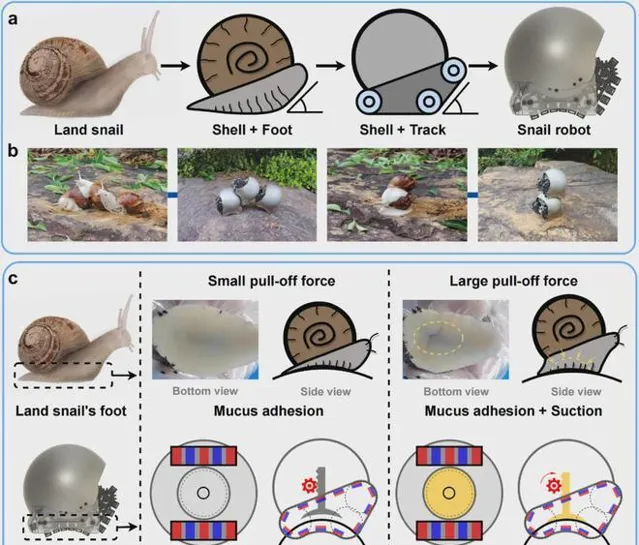
在面對戶外環境部署陸地機器人群體的挑戰時,研究人員的設計集中在兩個關鍵領域。首先,致力於開發一種新型的模組化自重構機器人,能夠單獨或作為群體在戶外環境中有效運作。這種機器人的設計受到陸地蝸牛形態學的啟發,尤其是它們在復雜地形中運動的能力。借鑒蝸牛的爬行和附著行為,機器人裝備了球形外殼和可移動的「足」,顯著提高了它們的機動性。這樣的設計還使機器人集群能夠透過鐵磁性外殼相互連線,形成靈活的大型結構以執行更復雜的任務。
第二個設計重點是創造一種高效且穩定的連線機制。傳統的自由形式連結器通常缺乏穩固的連線機構,為了解決這一問題,研究人員開發了一種雙模式連線機制。這一機制結合了磁力吸附和真空吸附系統,靈感來源於蝸牛對不同外力的適應策略。這種混合連線方式允許機器人在任何位置動態地進行附著,同時,真空吸附可以在受到外部壓力時增強連線的穩定性。這種創新的連結器設計不僅提供了連線位置的靈活性,還維持了整個機器人群體的結構完整性,這對於在多變的戶外環境中的有效操作至關重要。
這些機器人集群巧妙地借鑒了蝸牛在自然界中的生存策略,將其套用於解決現代技術中的實際問題。透過這種方式,機器人能夠靈活地適應復雜和多變的戶外地形,展示出科技與自然融合的美妙。
▍創新連線機制:磁性履帶與吸盤系統
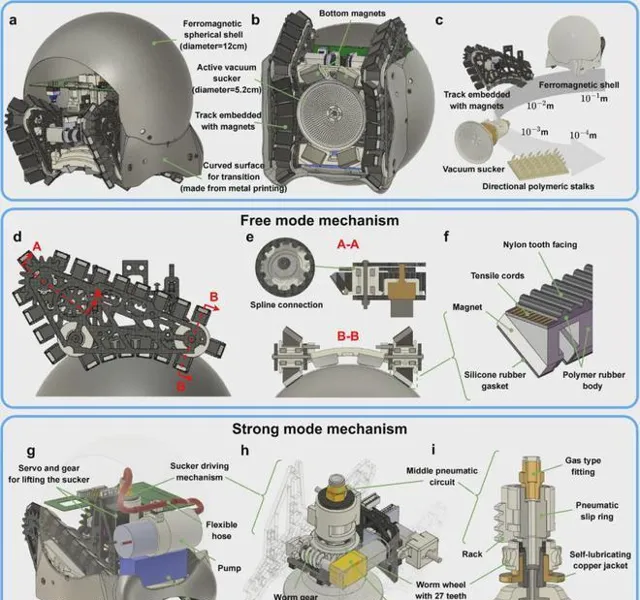
蝸牛機器人采用了自由磁性連線和固定式吸盤連線兩種機制。在自由磁性連線模式下,機器人主要依靠裝有嵌入式磁鐵的兩條履帶。這些履帶由輕質的軟聚合物橡膠和同步帶構成,磁鐵嵌入在軟聚合物橡膠內,以增強與球形表面的接觸貼合度。履帶的橫截面設計包括尼龍齒和繩索,以及聚合物橡膠主體部份。同時,矽橡膠墊圈的添加則增加了履帶與機器人殼體之間的摩擦力,提高了連線的穩定性。在固定吸盤連線機制中,當蝸牛機器人需要更強的連線力時,它會透過齒條驅動吸盤伸展以接觸下方的球形殼體。機器人的主體裝有負壓空氣泵,該泵透過柔性軟管與中心的旋轉氣動電路相連。吸盤始終保持與球形殼體的緊密接觸,並透過單鍊結氣動旋轉環實作360度旋轉,同時不損失由空氣泵提供的負壓。這種設計使得連線不僅穩固,還能在不同方向上進行靈活調整,以適應復雜的外部環境。
▍雙模式操作:適應多樣化功能需求
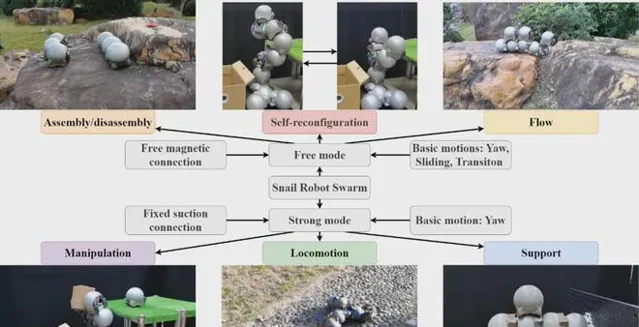
研究人員將陸地機器人群體的多樣化功能分為六大類:自組裝/自分離、自重組、流動運動、操控、移動和支撐。這些任務對移動性和連線強度的需求各不相同,因此蝸牛機器人開發了兩種不同的操作模式:自由模式和強力模式。在自由模式下,機器人利用嵌入磁鐵的差速履帶,實作靈活的磁性連線。這種模式可以執行旋轉、滑動和模組間轉移等三個主要動作,適合需要高靈活性的任務,自組裝/自分離、自重組、流動運動。磁性連線使得機器人能夠在其他機器人表面上靈活、平滑地移動,增強了群體在動態環境中的適應能力。而強力模式則用於需要更高結構穩定性和更強連線的任務。在這種模式下,機器人利用可伸縮的真空吸盤,增強了抵抗外部扭矩能力,同時也擁有了更大的旋轉驅動扭矩。這一模式對於執行更具挑戰性的任務至關重要,如操控、移動和支撐,這些任務可能需要多個機器人相連或形成延伸的懸臂結構。
▍單機運動測試
為了測試蝸牛機器人集群的效能,研究人員分別在戶外進行了單個機器人的移動測試和多機協同操作的測試。單個蝸牛機器人可以在戶外不平整地面移動,也可以透過一些較窄的溝壑。
另外,單個蝸牛機器人也能在草坪這種較柔軟的地面移動。
▍多機器人協同工作
然而,當單個蝸牛機器人面對較為崎嶇的地形時,由於其體積的限制,往往難以順利透過。研究人員為了全面評估這些機器人的實際套用潛力,對多個機器人的協作運動進行了一系列的測試。研究人員測試了蝸牛機器人集群在不同復雜環境下的透過能力,其中包括天然石頭台階:
或者是整體透過人工鵝卵石地面:
以及以流動運動透過天然溝壑等難度較高的地形:
這些測試旨在驗證集群協作時能否克服單機運動的局限性,展現出更強的適應力和能力。
同時,研究人員也對蝸牛機器人集群的操作能力進行了深入的測試。首先,在戶外環境中,多個蝸牛機器人協同形成機械臂,成功地將放置在巨石上的單個蝸牛機器人安全運送至地面:
此外,研究人員還展示了由7個蝸牛機器人模組組成的單臂機械臂如何自我重組成一個雙臂機械臂,自由移動的機器人與雙臂機械臂協作,共同將一個物塊搬運到紙箱中:
這些實驗不僅展現了蝸牛機器人在復雜環境下的適應力和協作能力,也驗證了它們在執行精細任務時的高效性。

▍潛力巨大,未來可期
研究人員相信,電影【超能陸戰隊】中具備自由重構特性的"微磁機器人"展現了模組化自重構機器人的極致潛能。蝸牛機器人集群的開發與套用,正是對此類機器人在戶外實際環境中部署的一次重要嘗試。展望未來,研究人員計劃繼續推進這一計畫,重點研究提升機器人的感知能力、模組間的異構化以及自重構運動規劃的演算法,以進一步拓展其功能和套用範圍。
▍其他資訊
本文通訊作者為香港中文大學(深圳)林天麟教授,第一作者為碩士研究生趙達。本研究得到了國家自然科學基金、科技部重點研發計劃、廣東省傑出青年科學基金的大力支持和幫助。課題組連結:https://freeformrobotics.org/











