在2024年的WAIC世界人工智慧大會上,國家地方共建人形機器人創新中心釋出了全球首款全尺寸通用人形機器人開源公版機「青龍」,公司的基本情況想必大家都知道在此做簡單的闡述:
產品公司簡介 :青龍產品由人形機器人(上海)有限公司自主研發,該公司是國家地方共建人形機器人創新中心新設立的開源人形機器人公司,註冊資本10億元。
產品主要參數情況 :身高185cm,體重80kg,43個主動自由度,最大關節峰值扭矩396Nm,算力支持400Tops。
產品亮點 :高度仿生構型,擬人化運動控制,支持多模態互動和操控,開源技術,具備快速行走、敏捷避障、穩健上下坡、抗沖擊幹擾等運動功能。
一、整體系統組成說明
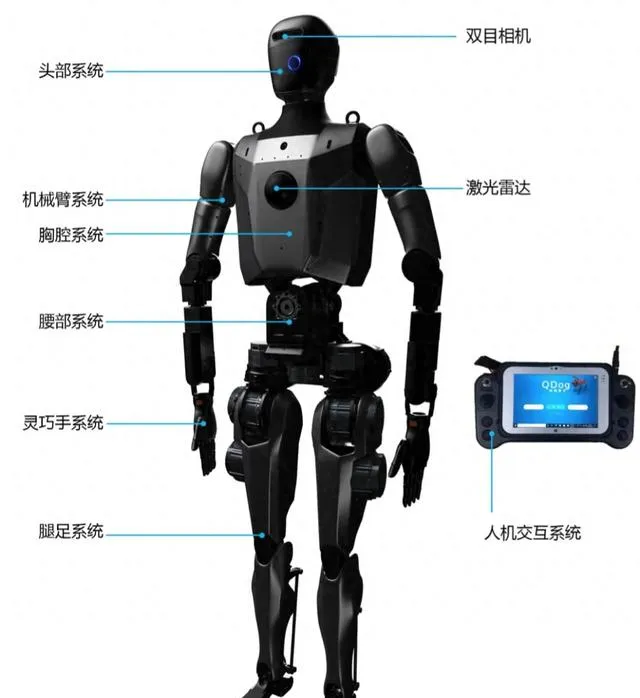
青龍全尺寸通用人形機器人包括頭部、胸腔、手臂、靈巧手、腰部、腿足等6個大類10多個系統元件組成。
二、主要硬體位置和技術路線簡述
1、外部感知配置:
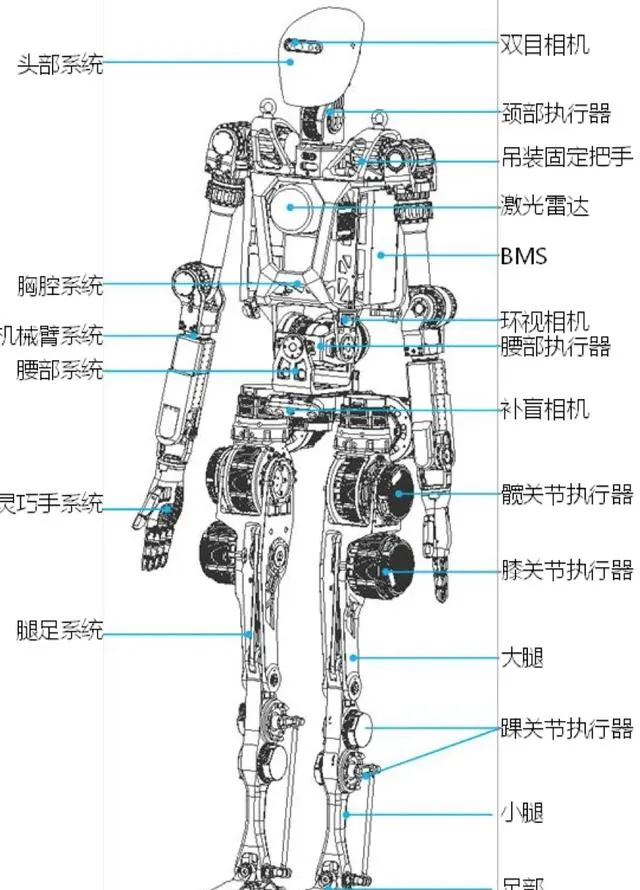
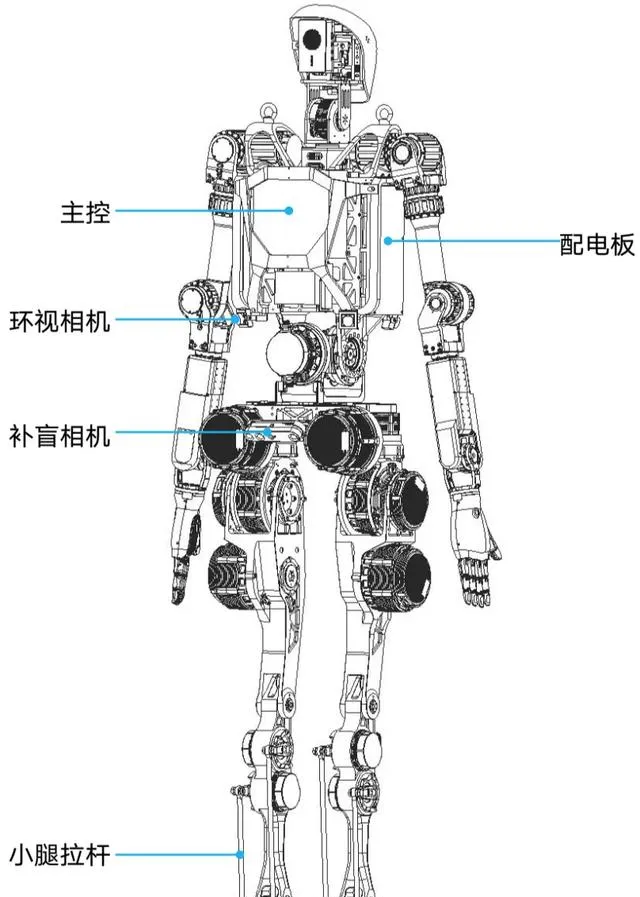
頭部配備一個雙目相機,在髖和腰之間前後各配備一組補盲相機,在胸腔和腰部前後各配備2個單攝的環視相機(依照視場角有可能各配一個廣角魚眼相機也可以),最後在胸腔前方配置一組雷射雷達。
2、上身結構和技術路線
包括頸部的2個執行器和雙臂14個執行器都是旋轉執行器,現場交流看大機率采用的是無框力矩電機+諧波減速器方案。
3、下身結構和技術路線
下身創新性的采用了軸向磁通電機+行星減速器方案,最大關節峰值扭矩396Nm,當然在論壇大會上也考慮在二代上使用行星滾柱絲杠的直線執行器方案,這個有待跟蹤確認。
4、控制系統說明
無論是主控還是電池BMS系統、熱管理,主電池等都放在胸腔內,組成大腦和小腦控制中樞。
三、自由度分配和詳細部件配置說明
1、全身自由度分布情況

青龍跟其他雙足機器人的自由度分布類似,整體看頭部2個自由度主要是俯仰和左右扭頭動作,單腿6個主動自由度分別分布在髖關節、膝關節和踝關節,腰部3個自由度俯仰、側擺和左右周轉,手臂和腿的自由度分配參見下圖所示:

2、靈巧手解析
單只靈巧手有19個自由度,6個主動自由度主要是大拇指2個,其他四個手指各1個,細分來看大拇指有 3 個自由度(2 個主動自由度),可實作主動彎曲伸展與主動側向擺動,四個手指各有4個自由度(1 個主動自由度),可實作主動彎曲伸展與被動側向擺動,整手重量不超過600g,單指負載不小於 15N,整手負載(四指握拳式)不小於 5kg。

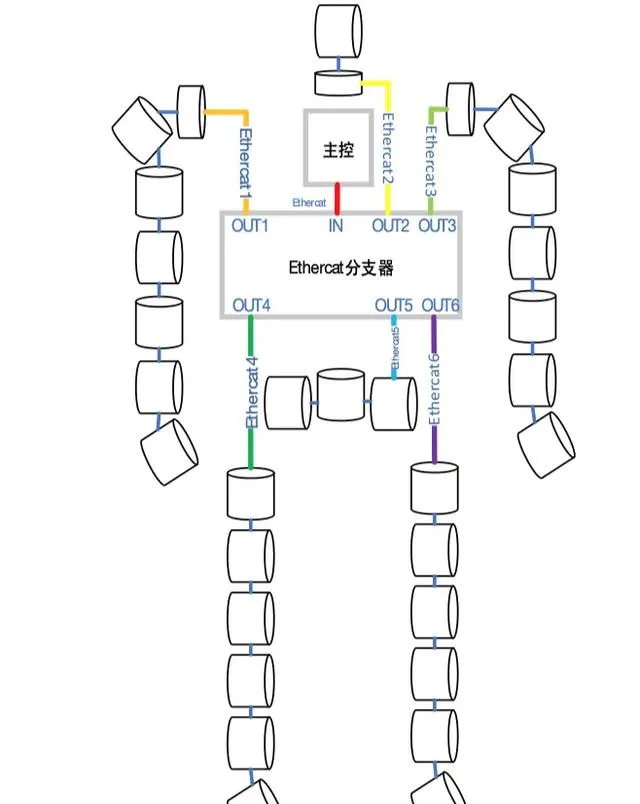
3、產品的底層驅動
整個人形機器人是基於EtherCAT匯流排的底層驅動,具有即時性高、擴充套件性強、可靠性高的特點,提供關節層控制介面,可實作對機器人的每一個關節的力矩、位置、速度控制。
聲明:文中所列圖片均來自上海人形機器人有限公司人工智慧大會現場演講資料和產品說明文件,如有侵權和使用不當請及時聯系刪除,只做交流學習,感謝您的理解。
往期閱讀推薦:
往期閱讀推薦連結文末,
如果你感興趣,歡迎大家點贊關註留言;
如果你需要服務,可以私信聯系我們;
如果你誌同道合,歡迎大家聯系我,共同交流學習進步。











