生物有機體,憑借其復雜而高度整合的結構,展現出了顯著的多功能性。以章魚為例,它能夠同時進行形態的變化和剛度的調整。這種獨特的特性啟發了軟體機器人領域的誕生和發展。該領域透過模仿生物特性,實作了機器人的高度靈活性和對環境的適應力。
然而,在當前軟體機器人設計中,通常需要整合多個獨立模組來實作形狀改變和剛度調節等功能。這種設計不僅使得結構笨重、制造擴充套件性差,而且控制系統復雜,常需多個控制回路以完成任務。相較於生物系統的高度多功能整合,軟體機器人的這一局限尤為明顯。盡管這樣的獨立模組化確實提升了系統的靈活性,使其能分別控制剛度與形狀,但在醫療裝置和可展開結構等套用場景下,這些功能往往需要同步實作。因此,開發一種整合式機器人結構,利用單一控制回路同時實作程式化驅動和剛度變化,已成為一個迫切的需求。
▍提出SAILS,實作形狀與剛度可變
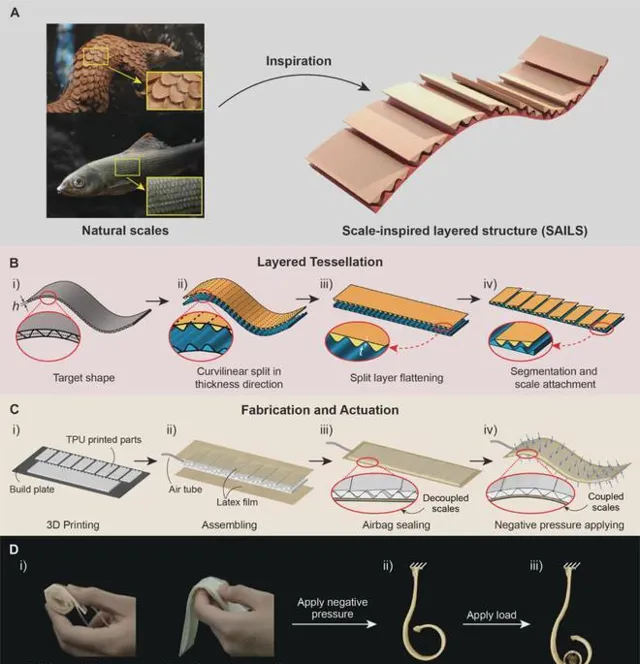
近日, 來自新加坡南洋理工大學王一凡教授團隊的研究人員, 受穿山甲和魚等生物體的可變剛度特性和自然鱗片結構的獨特機械效能及多功能性啟發, 開發出了一種名為「鱗片啟發的層狀結構」 (Scale-Inspired Layered Structure,簡稱SAILS)。
SAILS介紹
SAILS結構巧妙地融合了形狀變形與可變剛度兩大功能,顯著提高了機器人的適應力和多功能性。
SAILS結構由多個鱗片以及一個基層組成,均具有可編程的表面圖案。在未封裝狀態下,SAILS 保持柔軟和靈活。而當SAILS被封裝在彈性密封袋內並施加負壓時,鱗片和基層上的圖案受壓縮並緊密耦合,使整個結構變形為預設形狀,同時顯著提升剛度。
由於采用負壓驅動,其壓力變化低於1個大氣壓,故能實作較高驅動頻率,且體積不變。這種設計允許SAILS在軟態和硬態之間 實作高達53倍的表觀彎曲模量變化,可在高達5赫茲的頻率下驅動。 同時,使得機器人結構保持約1公釐厚度,並有進一步縮小的潛力。
SAILS的生物啟發、設計、制造和實驗驗證
透過開發一種兩棲軟機器人和能夠適應不同負載的無人機自適應、可調著陸系統,研究團隊進一步展示了 SAILS 的多功能性。
該研究成果相關論文 已以 「Scale-Inspired Programmable Robotic Structures with Concurrent Shape Morphing and Stiffness Variation」 為題發表在【Science Robotics】期刊上。 文章第一作者為博士生陳天雨。共同作者包括博士生楊旭東、張博建以及博士後研究員李君威、潘傑為論文的共同作者。 通訊作者為王一凡教授。
接下來,一起來和機器人大講堂深入探索這一研究成果!
▍SAILS設計和制造
SAILS的設計和制造流程汲取了自然界的智慧,透過一種獨特的分層鑲嵌技術,精準地構建了鱗片和基層上的微觀圖案。 以一個具有波浪形輪廓和特定厚度h的目標形狀為例,研究團隊詳細展示了SAILS的制作過程。
首先,確定了目標形狀的中間表面,並在上面繪制了一個振幅為h/2、具有特定周期數的正弦曲線。沿著這一曲線將板材切割成兩部份,並分別上色以便於區分。
然後將分離層的上下表面劃分為四邊形單元,透過調整每個單元之間的角度使之展平,同時保持其幾何形狀不變,以便上下邊界均呈平面狀。為了增強最終結構的機械強度,每層的背面都添加了厚度為t的薄型支撐片。

SAILS的制造和裝配
接下來,將上層分割成多個鱗片,確保這些鱗片上的圖案與基層的對應周期緊密匹配,以避免錯位。最後,將這些鱗片附著到基層上,形成了完整的SAILS結構。
在制造階段,研究團隊采用了熔融沈積成型(FDM)三維打印技術,使用熱塑性聚氨酯(TPU)線材來打造鱗片和基層,並覆蓋了一層聚四氟乙烯(PTFE)膠帶以減少摩擦。透過電烙鐵選擇性加熱鱗片的一側,將其精準地粘附至基層。隨後,將SAILS封裝在兩片乳膠膜之間,用矽膠密封形成氣密外殼,並連線軟管以便操控內部壓力。
值得一提的是, 研究團隊還開發了有限元(FE)模型來模擬SAILS的力學行為。 這個模型能夠準確地再現實驗中觀察到的三點彎曲和形狀變形結果,為SAILS的設計和最佳化提供了有力的工具。透過與實驗數據的對比驗證,FE模型展現了極高的預測準確性,進一步證實了其作為設計工具的可靠性。
▍SAILS效能試驗與測試
在實驗驗證環節,研究團隊精心設計了一系列實驗來全面展示SAILS的變形能力和剛度特性。
SAILS的形狀變形
為了展示 SAILS 的形狀變形能力,研究團隊 創造了具有零高斯曲率的一維表面和具有非零高斯曲率的二維表面,並選取了幾種具有可展曲面特性的典型結構進行了實驗和模擬。 這些結構具有零高斯曲率,包括鉤形、波浪形和螺旋形表面。
透過套用90 kPa的負壓,研究團隊發現目標形狀、有限元 (FE) 模擬與實驗結果之間存在極高的一致性,其均方根誤差 (RMSE) 僅為 ~5%。此外,研究人員還探索了具有非零高斯曲率的不可展曲面結構。為實作這些復雜結構的變形,他們采用了網格狀設計。
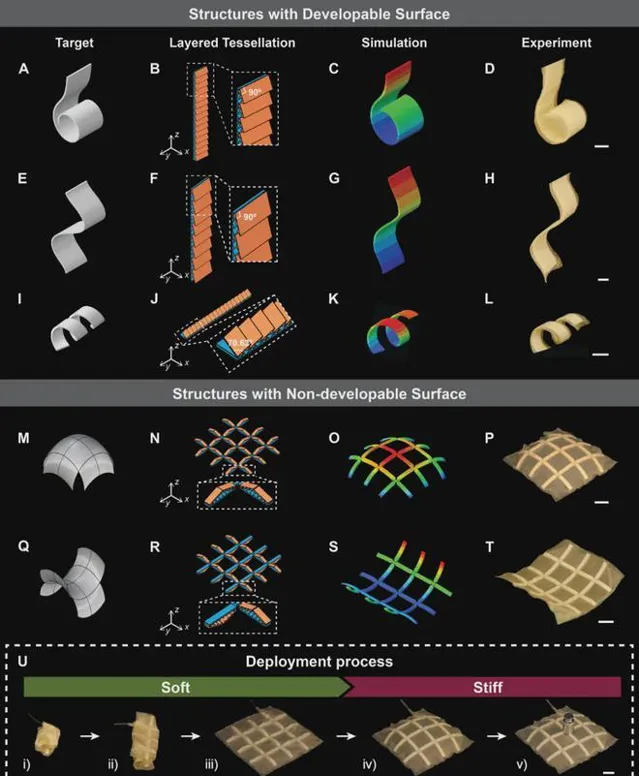
透過SAILS實作可展及不可展曲面的變形
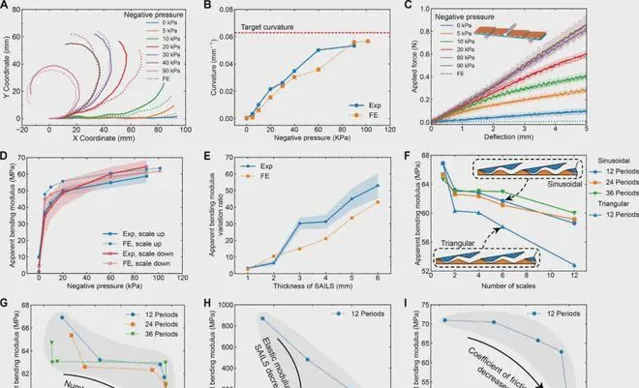
為了定量評估 SAILS 的形狀變形能力,研究團隊還設計了一個目標形狀為半徑15.92 mm的圓形的SAILS樣本。 在0至90 kPa負壓下,SAILS展現出了逐漸接近目標曲率的變形能力。在90 kPa負壓時,SAILS的曲率達到了0.0534 mm−1,與目標曲率非常接近。
此外,90 kPa負壓下 SAILS 和氣囊的應力和應變分布顯示,鱗片和基層的最薄區域是應力和應變集中的主要區域。 氣囊中的最大真應變為1.32,遠低於乳膠膜的拉伸極限,這進一步證明了設計的合理性和材料的適用性。
SAILS的剛度變化
為了評估SAILS的剛度,研究團隊 采用了三點彎曲實驗。 這種實驗可以準確測量材料在受到外力時的抗彎曲能力,為SAILS的剛度提供定量評估。
用於測試的SAILS樣品尺寸為長10 cm、寬3 cm、厚2 mm,包含四個鱗片,每個鱗片上有三個正弦周期。透過對兩個樣品每個進行三次測試,研究團隊獲得了平均力-撓度曲線。結果表明,結構的剛度隨負壓的增加而單調增加。 當負壓超過60 kPa時,結構在撓度範圍內表現出線性彈性。負壓低於60kPa時,曲線的屈服行為由鱗片和基層間的分離和滑動引起。 有限元(FE)模擬結果與實驗結果一致。
SAILS的變形與變剛度效能表征
研究人員計算了SAILS在不同負壓下的表觀彎曲模量,結果顯示,在鱗片朝上的情況下,隨著負壓從 0 增加到 5 kPa,表觀彎曲模量從 9.8 MPa 迅速增加到 36.8 MPa。當負壓超過 20 kPa 時,表觀彎曲模量的增加變得不明顯,最終在 90 kPa 壓力下達到 58.7 MPa。這意味著 SAILS具有約 6 倍的高剛度變化率。在鱗片朝上和朝下條件下的剛度相似,則表明 SAILS 能承受來自兩個方向的負載並保持良好的承載能力。 FE 模擬結果與實驗結果非常吻合。
研究團隊還探討了SAILS的厚度對其剛度變化率的影響。 隨著SAILS厚度的增加,表觀彎曲模量變化率顯著增加,在SAILS厚度為 6 公釐時,最大比率為 53,超過許多現有的可變剛度系統。
隨著鱗片數量的增加,表觀彎曲模量在所有情況下都降低。這是因為鱗片數量的增加會增加結構中的切口數量,損害SAILS的剛度。正弦形表面圖案的表觀彎曲模量高於三角形表面圖案,而周期數的影響可忽略不計。
在工程變形材料中,形狀變化能力和承載能力通常相互排斥。下圖展示了這種權衡,其中每個數據點對應於SAILS的一種特定設計。結果表明,隨著鱗片數量的增加,表觀彎曲模量降低,而表征變形曲率的歸一化參數Kn在所有情況下均增加,表明兩種特性之間的權衡。類似權衡也出現在SAILS長度改為15 cm或改變材料內容時。
▍SAILS結構套用與驗證
兩棲軟體機器人
為了全面展示SAILS的功能與適應力,研究團隊將其套用於軟式兩棲機器人的設計中。
該機器人靈感來源於鰻魚和蛇的移動方式,采用行波運動,使其能在地面和水中自由導航,真正實作了兩棲能力。它由三個部份組成,每個部份包含兩個相對的腔室,每個腔室內建SAILS,並設計為可變形為半圓形的目標形狀。
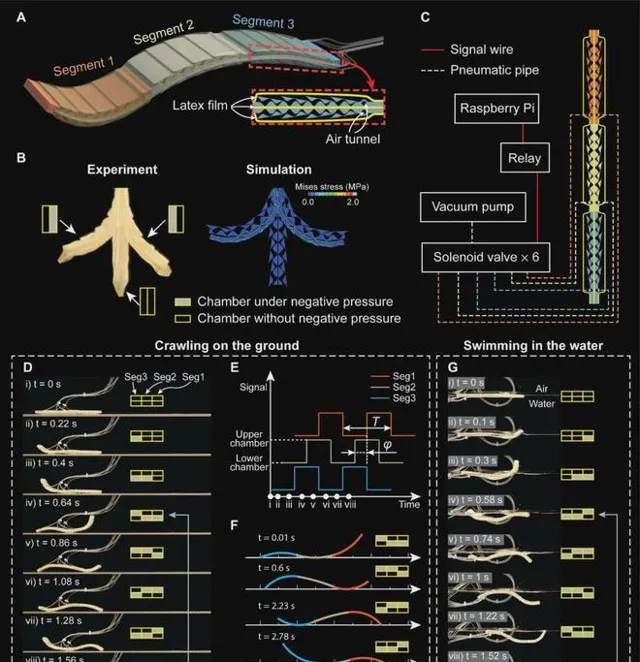
基於SAILS的軟體兩棲機器人:設計、控制與效能表征
由於SAILS的柔軟性,當一個腔室啟動時,它會變形為目標形狀,而未啟動的腔室則幾乎不受任何約束。因此,透過對不同腔室施加負壓,機器人可以向兩個方向彎曲。這種設計使機器人能夠在地面上爬行,也能在水中遊泳。
研究團隊開發了先進的控制系統來操作這款軟體兩棲機器人。透過依次啟動每個節段中的兩個腔室,可實作機器人在地面上的爬行。同時,研究團隊還開發了一個動力學模型來預測機器人在地面上的運動,建模結果與實驗結果高度吻合。
機器人翻越障礙以及從陸地入水
在水中遊泳時,機器人的運動機制有所不同。研究團隊透過調整驅動順序和控制訊號,實作了機器人在水中的高效遊泳。這款機器人展現了出色的運動能力、多功能性和適應力。它能克服障礙物、從陸地過渡到水中,並能在受限空間中靈活導航。此外,機器人還具有承載能力,能承載相當於其自身重量兩倍的負載,並能爬上22°的斜坡。
研究團隊進一步研究了驅動頻率對機器人速度的影響,並行現了一個最佳驅動頻率。使用自主開發的動力學模型,研究團隊準確預測了機器人在不同頻率下的速度。這些研究充分展示了SAILS在軟式兩棲機器人中的巨大套用潛力。
軟體機器人透過一系列不同高度的狹窄空間
為了展示SAILS可變剛度特性的獨特能力,研究團隊設計了一個更大的機器人,並展示了其越過障礙物、變成橋梁允許玩具車透過以及保護鵪鶉蛋免受落球傷害等功能。這款大型電腦器人還展現了增強的負載能力,能承載相當於其自身重量七倍的負載。這些實驗結果充分證明了SAILS在軟式兩棲機器人中的卓越效能和廣泛套用前景。
無人機可變剛度著陸系統
利用SAILS技術,研究團隊為無人機設計了一種獨特的鉤形起落架。這種設計不僅具有創新性,而且實用,能夠適應各種飛行條件和著陸環境。
為了實作無人機上的獨立自適應系統,研究團隊精心整合了真空泵、電磁閥、壓力表以及Raspberry Pi等元件,以精確控制起落架的展開過程。這些元件的選擇和配置都經過仔細考慮,確保系統的可靠性和穩定性。
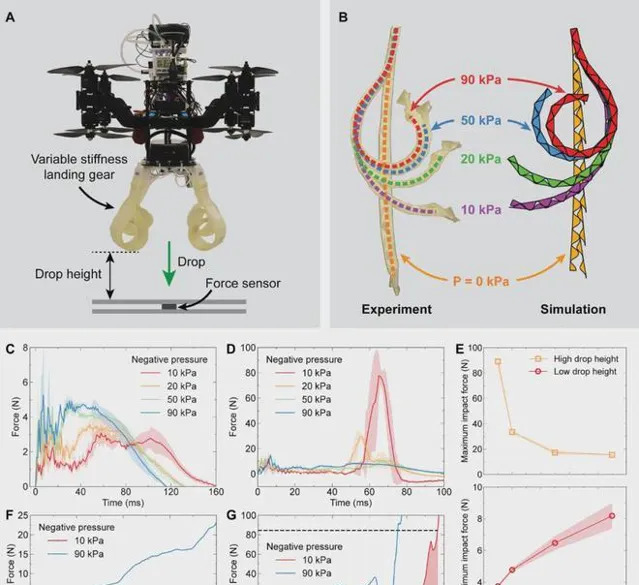
基於SAILS的變剛度無人機著陸裝置
為了科學評估這種自適應起落架的抗沖擊效能,研究團隊實施了一系列嚴謹的跌落測試。無人機分別從3厘米和20厘米兩個不同高度釋放,以模擬不同的飛行場景和緊急情況。測試結果揭示了一個有趣的現象:在較低跌落高度下,最大沖擊力隨負壓增大而上升;而在較高跌落高度下,則呈現相反趨勢,即最大沖擊力隨負壓增大而減小。這一發現與先前對其他可調剛度結構的觀察結果相一致。
為了深入解析這一現象,研究團隊利用有限元(FE)模擬進行了對比分析。他們分別觀察了起落架在10 kPa和90 kPa兩種不同負壓下的壓縮情況。透過分析,研究團隊發現力-位移曲線提供了比較能量吸收能力的直觀依據。他們指出,在10 kPa負壓下,由於起落架的剛度較低,峰值力也相應較低。相反,在90 kPa負壓下,起落架未發生折斷,因此峰值力保持較低水平。此外,研究團隊還發現,在更高能量的沖擊下,即無人機從更高高度跌落時,負壓較低的起落架所受力顯著增加。這是因為固定端接觸地面所致。而圖7F中的陰影區域所代表的能量吸收量低於圖7G,這恰好對應了無人機從較低高度跌落的場景。
無人機著陸裝置在空中的部署過程
借助機載控制系統,研究團隊可以靈活設定施加於起落架上的負壓。他們展示了無人機起落架的展開過程,並證實了其穩定性。此外,起落架還兼具夾持功能,能夠輕松提起225克的負載,並攜帶負載順利起飛。這一系列演示充分展現了SAILS作為無人機起落架的卓越多功能性。
參考文章:
https://www.science.org/doi/10.1126/scirobotics.adl0307#sec-1











