來源:焉知科技
作者 | 楚欣
出品 | 焉知
感知傳感器是人形機器人邁向智慧化的基礎。
如同智慧駕駛需要感知-決策-執行三部曲,人形機器人也需要這樣的流程:透過傳感器感知關鍵狀態,經過微處理器、電腦或神經網路處理分析後,交由機械臂、雙足或輪子等移動裝置或加熱/制冷裝置等非移動裝置執行相關工作。
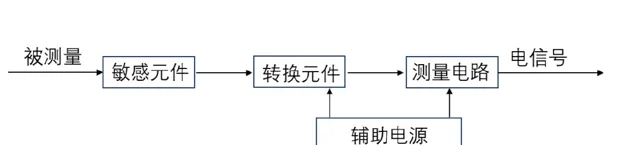
傳感器是能感受被測量並按照一定的規律轉換成可用輸出訊號的器件或裝置,一般由敏感元件、微處理器、訊號轉換電路三部份組成。其中 敏感元件 是指直接感受測量資訊,並輸出與被測量資訊成確定關系的某一物理量的元件; 微處理器 是指以敏感元件的輸出為輸入,把輸入數據轉化為電路資訊的元件; 訊號轉換電路 再將電路參數轉換成便於測量的電訊號,實作訊號的獲取與輸出。
感知傳感器作為人形機器人感知系統的核心元件,作為人形機器人實作檢測和控制的首要環節,是機器人系統獲取外界狀態和自身狀態的重要途徑,也是機器人邁向自主化、智慧化的基礎。本文主要探討人形機器人的視覺傳感器、力/力矩傳感器、觸覺傳感器、IMU慣性傳感器。
一、視覺傳感器
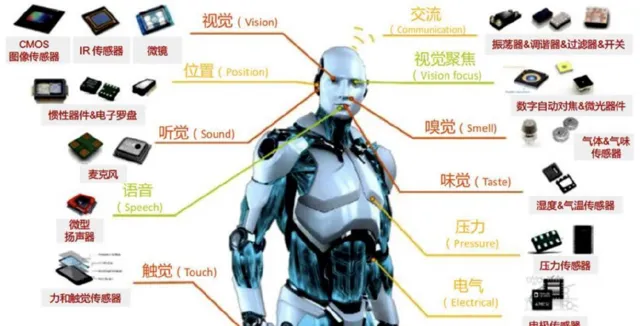
人所獲得外界資訊的80%是靠視覺得到的,機器也類似。機器視覺本質上是為機器植入「眼睛」,利用環境和物體對光的反射來獲取和感知資訊。
視覺傳感器是一種使用光電傳感器件來獲取物體影像的裝置,它能夠將物體影像轉化為數位訊號,並且對影像進行處理和分析。視覺傳感器的工作過程包含檢測、分析、描繪和辨識四部份: 視覺檢測 主要利用影像訊號輸入裝置,將視覺資訊轉換成電訊號; 視覺影像分析 是把攝取到的所有訊號去掉雜波及無價值像素,重新把有價值的像素按線段或區域等排列成有像素集合; 視覺描繪和辨識 是從物體影像中提取特征,給予標誌。
根據影像資訊獲取維度、處理數據型別的不同,機器視覺可劃分為 2D 視覺與 3D 視覺。2D 視覺透過工業相機來獲取平面圖片,主要基於物體的一個平面特征進行後續分析,無法獲取物體的空間座標資訊。3D 視覺能夠采集視野內空間每個點位的三維座標資訊,透過演算法獲取三維立體成像,並根據這些數據資訊分析得出有關目標物件在空間中的位置、形狀、體積、平面度等資訊,以達到檢測、引導、測量、定位等功能。
隨著智慧制造的不斷深入,面對復雜的物件辨識和尺寸量度任務,以及人機互動所需要的復雜互動,2D 視覺在精度和距離測量方面均出現部份技術局限, 市場對 3D 視覺的需求開始與日俱增 。在人形機器人套用領域,3D 視覺傳感器可以幫助機器人高效完成人臉辨識、距離感知、避障、導航等功能,使其更加智慧化。
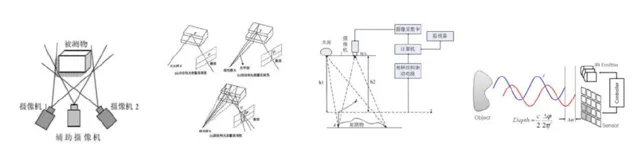
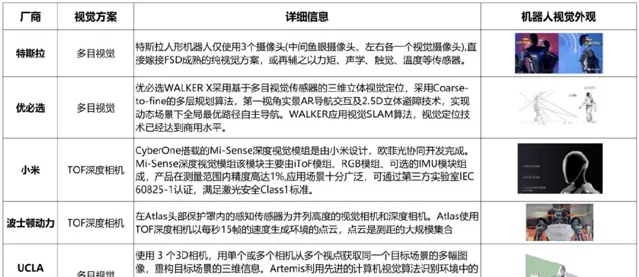
3D重構目前主要的技術有結構光、iToF、dToF、立體視覺、Lidar、工業三維測量等, 人形機器人視覺傳感技術主要使用多目立體視覺和 iToF 法 。多目立體視覺是立體視覺方法中的一種,最少使用 3 個網路攝影機即可實作,用單個或多個相機從多個視點獲取同一個目標場景的多幅影像,重構目標場景的三維資訊,特斯拉和 UCLA 均使用3 個 3D 相機即可實作多目立體視覺。iToF 是指時間往返行程采用時間選通光子計數器或電荷積分器外推獲得而不需要精準計時的方案,可以實作面積範圍成像,小米和波士頓動力使用該方案。
機器視覺市場的市場主要被美、德、日品牌占據,主要有美國康耐視、德國巴斯勒、日本基恩士和歐姆龍等,其中基恩士和康耐視作為全球機器視覺行業的兩大巨頭,壟斷了超60%的全球市場份額。中國機器視覺市場起步較晚,直到20世紀末期才陸續有相關技術公司成立,且銷售規模較小,相關企業有奧比中光、偉景智慧、遠形時空等。
此外,3D視覺傳感器相關企業有英飛淩、奧比中光、瑞芯微、 華捷艾米等。
二、力/力矩傳感器
力/力矩傳感器是一種能感知力、力矩並轉換成可用輸出訊號的傳感器,主要包括 本體單元和應變/形變檢測系統 兩部份。力/力矩傳感器的核心原理是將力作用下的形變轉換成電訊號,當有力/力矩作用時,力/力矩施加於傳感器本體單元上,並引起本體單元的應變或形變,檢測系統可感知本體的應變或形變,透過電路將其轉化為相應電壓,透過測量電壓值來表征力/力矩大小,並轉換成可用輸出訊號,實作力/力矩的測量。
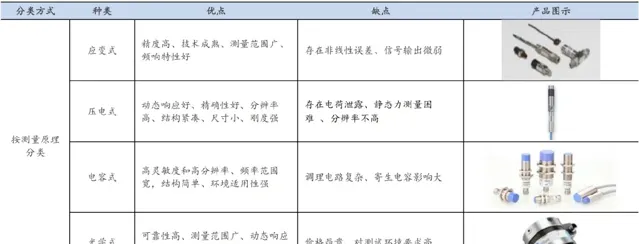
根據其測量原理不同,力/力矩傳感器可以分為光電式、應變式、電容式、壓電式等多種型別。這其中, 應變式力/力矩傳感器是當前技術最為成熟、套用最廣泛的傳感器型別 。壓電、電容和光電等測量原理的力傳感器有一定的理論研究和實驗基礎,但下遊尚未得到廣泛套用。
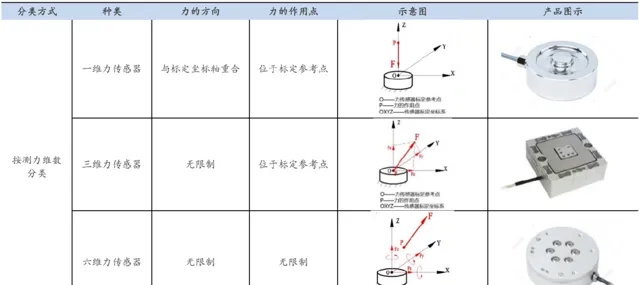
根據特斯拉 AI DAY,預計特斯拉機器人關節處使用單維力傳感器,執行器末端使用六維力傳感器。根據測量維度,力傳感器可以分為一維、多維(三維、六維)力傳感器。一維力傳感器僅檢測一個方向的作用力或力矩,工業中套用廣泛,價格也較為便宜(大多為數百元)。多維力傳感器僅包括三維力和六維力傳感器,均需要標定 XYZ 座標軸,區別在於應變片的數量及解耦演算法。 六維力傳感器是最高端的力矩傳感器 ,同時測量 XYZ 軸向力和環繞軸的力矩,內部的演算法可以解耦各個方向的力和力矩的幹擾,套用於高端機器人和精密裝置中,價格也十分昂貴(大多在數千元至上萬元)。
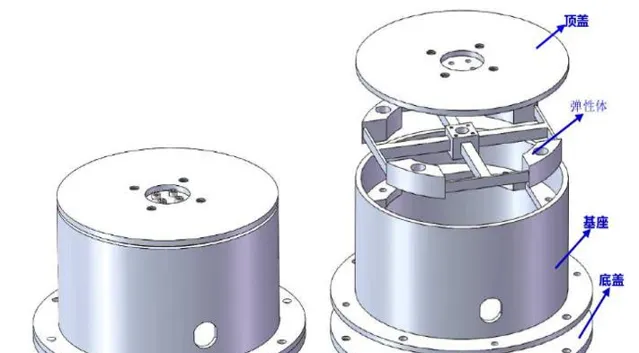
如下圖所示,六維力傳感器共由四部份機械元件組成:十字梁型彈性體(簡稱彈性體)、底盤、基座和頂蓋。彈性體結構的主梁的正反面或側面貼有應變片,當外力/力矩作用於傳感器上時,彈性體變形,使貼上在彈性體上的應變片發生形變,然後透過應變電橋轉換成電橋的電壓輸出出來。應變片和彈性體是六維力傳感器核心元件。
六維力傳感器技術壁壘
結構設計、標定與檢測、演算法設計是六維力/力矩傳感器領域的三大壁壘。
結構設計: 兼顧高靈敏度、高動態效能和低維間耦合的原理和結構創新是當前電阻應變式多維力傳感器研制中面臨的一大挑戰。高靈敏度要求應變測量區域的剛度盡可能小而易於產生應變,而高動態效能則通常要求整個結構的剛度盡可能大。此外,結構上的連續性導致彈性體各區域之間在受外載荷時不可避免地會產生耦合變形(應變),進而可能導致耦合輸出。因此,對於六維力/力矩傳感器而言,結構設計至關重要。
標定與檢測: 標定指透過對樣本空間中的樣本點進行精確載入,建立傳感器訊號與力和力矩的對映關系,獲得解耦演算法的數學模型和參數。六維力/力矩傳感器需要對六維樣本空間進行標定,難度遠高於一維傳感器。主要體現在樣本空間更大、標定裝置更復雜、數學模型理論基礎更深三個方面。
演算法設計: 六維力傳感器的內部演算法,會解耦各方向力和力矩間的幹擾,使力的測量更為精準。高精準度的軍用六維力傳感器,可以確保在六維度聯合承載的情況下,測量值偏差在量程的 0.3%FS 以內。
目前六維力矩傳感器成本高的主要說法有兩種:
說法一:成本高主要在於應變片和人工成本。
應變片: 每個六維力矩傳感器通常需要使用約30-40個應變片,在軟硬體方面都存在諸多技術難點,導致應變片成本較高。
人工成本: 在目前國內外技術條件下,六維力矩傳感器生產的貼片、溫度補償、測試等核心環節仍然須由人工完成,生產過程全自動化存在困難,人工成本較高。
說法二:成本高主要是因為座標軸標定裝置和解耦演算法研發的高額投入。
六維力傳感器存在多種檢測原理,矽基/金屬箔等電阻應變片具有更好的效能優勢,原理是應變片受力後產生的微米級別的變形導致電阻和電壓的變化,金屬箔應變片價格較高,目前為 10 元人民幣左右,而 MEMS 工藝下的矽基應變片可以降低至 1 元以下 ,因此應變片成本並不是六維力傳感器成本高昂的最主要原因。其高昂的成本主要來源於座標軸標定裝置和解耦演算法研發的投入,多維力矩傳感器需要應對因結構加工和工藝偏差引起的各維度間相互幹擾的問題,以及動態和靜態標定問題,同時還需要解決向量運算中的解耦演算法和電路實作等問題,此外還要確保產品的一致性,因此在未大規模放量的情況下成本依然較為高昂,即使國內廠商具有顯著的成本優勢,也需要上千元的平均成本。
三、觸覺傳感器
根據Tesla Bot Update 視訊,一代機器人靈巧手具有「自適應力(Adaptive grasp)」和「非反向驅動能力(Non-backdrivable fingers)」,可以做到能做到收拾杯盤等復雜活動、分揀樂高等;二代機器人靈巧手的仍保持11個自由度,但是運動的速度和抓取效能大幅提升,指尖中陣列觸覺傳感器的使用是重要增量,可以做到精準力控並雙指捏起雞蛋。

根據去年12月特斯拉在YouTube公布的視訊,二代靈巧手指尖配有觸覺傳感器,機器人先用左手的大拇指和食指抓取雞蛋,之後傳遞給右手,右手的食指和拇指接到雞蛋後將雞蛋放到托盤上,其中的亮點包括:① 精準力控 :依靠觸覺傳感器反饋,力控恰到好處,雙指捏起但不捏碎雞蛋;② 軟硬體協同升級 :機器人「大腦」知道何時加力、何時減力,並指導靈巧手進行操作,執行裝置可以精準完成大腦下達的命令並連貫完成動作。
觸覺傳感器,是Optimus Gen 2 精準力控的核心器件,它是人形機器人僅次於視覺的重要資訊源。與視覺不同,觸覺本身有很強的敏感能力,可直接測量物件和環境的多種性質特征,因此觸覺不僅僅是視覺的一種補充,觸覺的主要任務是為獲取物件與環境資訊和為完成某種作業任務而對機器人與物件、環境交互作用時的一系列物理特征量進行檢測或感知。
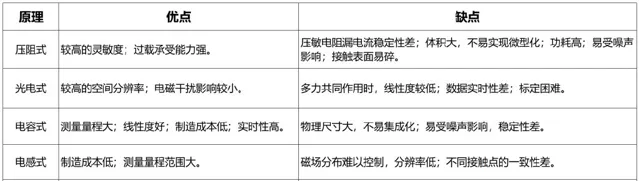
廣義的觸覺包括觸覺、壓覺、力覺、滑覺、冷熱覺等,它能感知機器人與環境的互動情況,以及所接觸目標的各種物理內容,如位置、形狀、柔軟度、文理、顏色、剛度等。觸覺傳感器本質上是將接觸面形狀、壓力、摩擦力、溫度等資訊進行感知辨識和轉換的傳感器,其組成部份包括電極、敏感材料和導電材料等。按照敏感元件原理,觸覺傳感器可分為壓電式、壓阻式、電容式、摩擦電式、電感式、光纖式等,其中壓電式、壓阻式、電容式、摩擦電觸覺傳感器套用較為廣泛。
本節主要探討的是當下觸覺傳感器兩種主要的技術路線:MEMS、柔性觸覺傳感器。
1、MEMS壓力陣列傳感器:
1)區分幾個概念
MEMS (Micro-Electro-Mechanical System)是一個廣泛的技術領域,是一種微型而精密的機械系統,它將微型機構、微型傳感器、微型執行器以及訊號處理和控制電路等整合於一塊或多塊芯片上,產品尺寸一般都在 3mm×3mm×1.5mm。MEMS技術結合了微電子技術和微機械加工技術,具有體積小、功耗低、整合度高、成本低和效能高等特點。
MEMS傳感器 是采用微電子和微機械加工技術制造出來的新型傳感器,是MEMS技術中的一種具體套用,專門用於感知和測量各種物理量。MEMS傳感器能夠感知並測量各種物理量,如溫度、濕度、光照強度、壓力、加速度等,並將這些物理量轉化為電訊號進行處理。與傳統的傳感器相比,MEMS傳感器具有體積小、重量輕、成本低、功耗低、可靠性高、易於整合和實作智慧化等優點。
MEMS壓力陣列傳感器 則是MEMS傳感器的一個子類別,專註於壓力測量,並具有陣列式結構。與普通MEMS壓力傳感器相比,MEMS壓力陣列傳感器通常包含多個壓力傳感單元,這些單元以陣列的形式排列,能夠同時測量多個點的壓力變化。這種設計使得MEMS壓力陣列傳感器在需要高空間分辨率和壓力分布測量的套用場景中具有顯著優勢。
2)基於MEMS技術的優勢,大部份常用的觸覺傳感器或多或少地套用MEMS技術。前述五類不同的觸覺傳感器中, 壓阻式觸覺傳感器為目前的主流選擇 ,其靈敏度高、分辨率高、技術相對成熟且成本較低,其中MEMS 壓阻式傳感器為主要的套用趨勢。與傳統的傳感器相比,MEMS傳感器具有體積小、重量輕、成本低、功耗低、可靠性高、適於批次化生產、易於整合和實作智慧化的特點。同時,微米量級的特征尺寸使得它可以完成某些傳統機械傳感器所不能實作的功能。
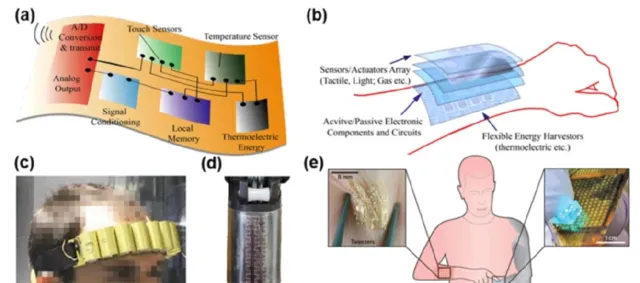
2、柔性觸覺傳感器(電子皮膚):
柔性觸覺傳感器是利用柔性材料的物理特性,將外部的力學量轉換為電資訊,從而實作對觸覺感知的傳感器產品。柔性觸覺傳感器又稱為「電子皮膚」,能夠實作與環境接觸力、溫度、濕度、震動、材質、軟硬等特性的檢測,是機器人直接感知環境作用的重要傳感器。傳統的觸覺傳感器以各種剛性材料為敏感元件,存在笨重和硬脆的缺點;柔性觸覺傳感器則具備類似於人類皮膚的柔韌性,可以適應任意載體形狀,更利於測量物體表面受力資訊、感知目標物體性質特征,具有研發和產業化價值,目前正處於研發和小批次套用階段。
按照轉換訊號原理的不同,柔性觸覺傳感器可以分為壓阻式(電阻式)、電容式、電感式、壓電式、光電式等,其中電容式、壓阻式柔性傳感器套用較多。
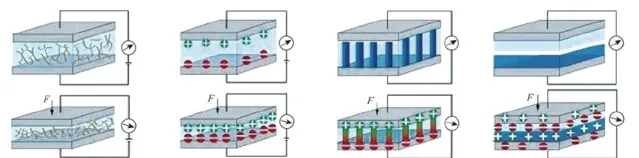
柔性壓阻式傳感器以器件結構簡單、靈敏度高、響應快、制造成本低、穩定性好等優點被認為是下一代柔性壓力傳感器的理想選擇。劣勢是體積大,不易實作微型化;功耗高,接觸表面易碎;易受雜訊影響。
柔性觸覺傳感器主要由基底材料、電極材料、功能層材料構成。基底材料是柔性觸覺傳感器的基礎,是決定傳感器彈性形變效能的關鍵因素。電極材料主要用於傳輸電訊號。功能層材料則是傳感器的核心部份,能夠將外部的力、溫度、濕度等物理量轉化為電訊號。
基底材料:決定傳感器彈性效能的關鍵因素。 基底材料起著支撐和保護傳感器的作用,要求它具有良好的柔韌性、耐腐蝕性、絕緣性以及溫度穩定性等。常用的柔性基底材料有 PET、PI、PDMS、Ecoflex、NR、TPU 等。
電極材料:電訊號傳輸。 傳統的電極一般為金屬材料,其本身不具有柔性,多采用減薄金屬膜層厚度或設計特殊結構等方法賦予其柔性,這將極大地提高成本且制備工藝復雜。目前,液態金屬和導電水凝膠的發展為其提供了新思路。
功能層材料:柔性觸覺傳感器的核心部份。 將外部的力、溫度、濕度等物理量轉化為電訊號。具有優異力電特性的功能層材料是決定柔性觸覺傳感器效能的關鍵,多采用金屬基材料、碳基材料及導電橡膠等。
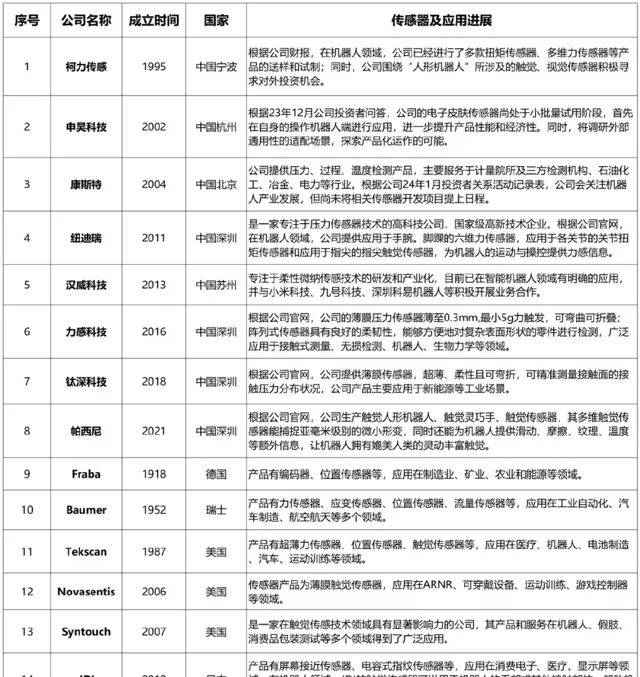
柔性觸覺傳感器高端產能被外國占據,市場格局較為集中。根據QYReaearch數據,全球柔性觸覺傳感器市場主要被海外企業占據,全球排名TOP5的廠商主要包括Novasentis、 Tekscan 、Japan Display Inc. (JDI)、Baumer、Fraba,合計占有大約57.1%的市場份額;國內企業主要包括鈦深科技、柯力傳感、 漢威科技 等。
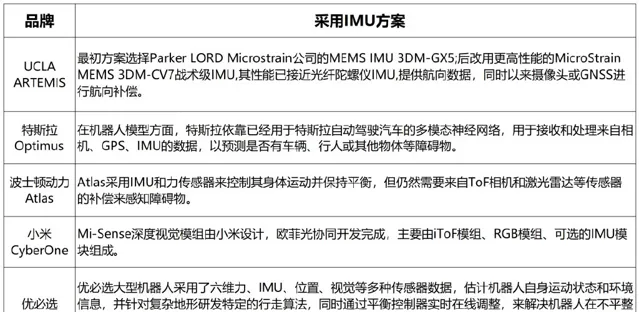
四、IMU慣性傳感器
慣性傳感器作為機器人的位覺感受器,是人形機器人姿態控制的核心。
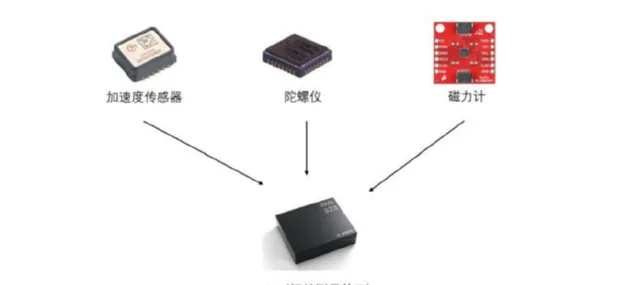
慣性傳感器是一種用於測量物體的加速度、角速度和傾斜角度等參數的電子傳感器,可為機器人提供運動感知和控制能力。根據被測物理量,慣性傳感器可以分為加速度傳感器(加速計)和角速度傳感器(陀螺儀)。另外,也有一些傳感器將加速度計和陀螺儀結合在一起,稱為慣性測量單元(Inertial Measurement Unit,簡稱 IMU)。
具體而言IMU是一種測量物體三軸角速度和加速度的裝置,通常包括三個單軸的加速度計和三個單軸的陀螺儀,有時還包括磁力計。狹義上,一個 IMU 內在正交的三軸上安裝陀螺儀和加速度計,共 6 個自由度,來測量物體在三維空間的角速度和加速度,就是「6 軸 IMU」;廣義上,IMU 可在加速度計和陀螺儀的基礎上加入磁力計,形成了「9軸 IMU」。透過這種方式,9 軸 IMU 能夠提供更全面的運動資訊,尤其是在需要確定物體在三維空間中的方向時。
IMU取代獨立MEMS加速計和陀螺儀大勢所趨,獨立的MEMS加速度計和陀螺儀越來越多地被MEMS IMU所取代。
IMU 在人形機器人領域套用廣泛,特別是在姿勢跟蹤、運動控制和導航方面。透過測量機器人加速度與角速度,幫助跟蹤機器人姿勢和運動狀態;提供即時運動數據並分析,實作機器人運動軌跡、速度精確控制;檢測機器人偏移與傾斜,進行即時姿態穩定和調整。在結合演算法後,IMU 提供的機器人運動資訊,可用於估計機器人的位置,並根據機器人的運動軌跡構建環境地圖。幫助機器人進行環境感知並避開障礙物,規劃安全路徑。同時實作路徑規劃、自主探索等智慧導航功能。
IMU產品生產工藝難度大,準入門檻高,市場份額分布相對集中,國際廠商占據壟斷地位,主要有BOSCH、ST、TDK等企業。國內主要有矽睿科技、 深迪半導體 、士蘭微、明皜傳感、敏芯股份等企業,市場份額比較小。
小結
人形機器人感知傳感器作為機器人感知系統的核心元件,是實作機器人智慧感知和自主操作的關鍵。隨著技術的不斷發展,各類傳感器在效能、成本、套用等方面都將不斷取得突破。未來,人形機器人將在更多領域發揮重要作用,為人類的生產和生活帶來更多便利和驚喜。
參考資料:
1、人形機器人傳感器專題:柔性控制新藍海,
https://www.sohu.com/a/749238459_121834010
2、賦予機器人柔性觸覺,提升精細化感知能力
https://www.sohu.com/a/756975754_121771907
3、電子皮膚:機器觸覺前進演化方向,靈巧手的下一解
https://xueqiu.com/6695901611/282643722
4、人形機器人實作「具身感知」的關鍵
https://baijiahao.baidu.com/s?id=1791469371466270689&wfr=spider&for=pc
5、感知能力決定機器人落地場景,各類傳感器多方面賦能
https://www.sohu.com/a/789864541_121713887
6、傳感器:人形機器人核心的感知部件
https://baijiahao.baidu.com/s?id=1792646445044882947&wfr=spider&for=pc
7、人形機器人:3大核心傳感器技術壁壘及市場規模分析
https://zhuanlan.zhihu.com/p/683254199











