在機器人腿部設計過程中,軸承在關鍵關節處扮演著不可或缺的角色。本文聚焦於足式機器人腿部關節捲動軸承的精度設計。由於本人尚處學習階段,若各位專家有更深入的見解或經驗,敬請不吝分享。
先來了解捲動軸承的基礎知識:
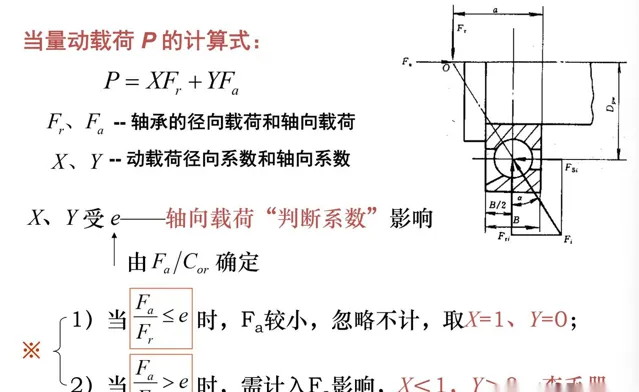
按承受負荷的方向劃分,捲動軸承可分為向心軸承(主要承受徑向力)、推力軸承(主要承受軸向力)以及角接觸軸承(能同時承受徑向力和軸向力)。我曾嘗試使用一對單列角接觸軸承作為機器人膝關節的軸承,但發現角接觸軸承內圈與外圈之間存在一定的徑向擺動自由度,導致膝關節除了能夠繞軸向轉動外,還會在徑向方向產生擺動。
按捲動體的形狀分類,軸承可分為球軸承、圓柱滾子軸承、滾針軸承、圓錐滾子軸承等多種型別。
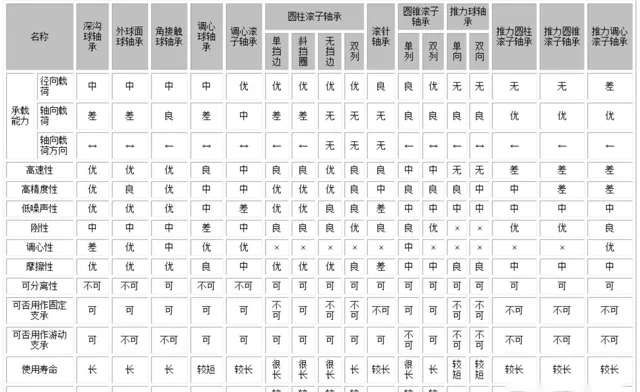
各類軸承的工作效能差異顯著
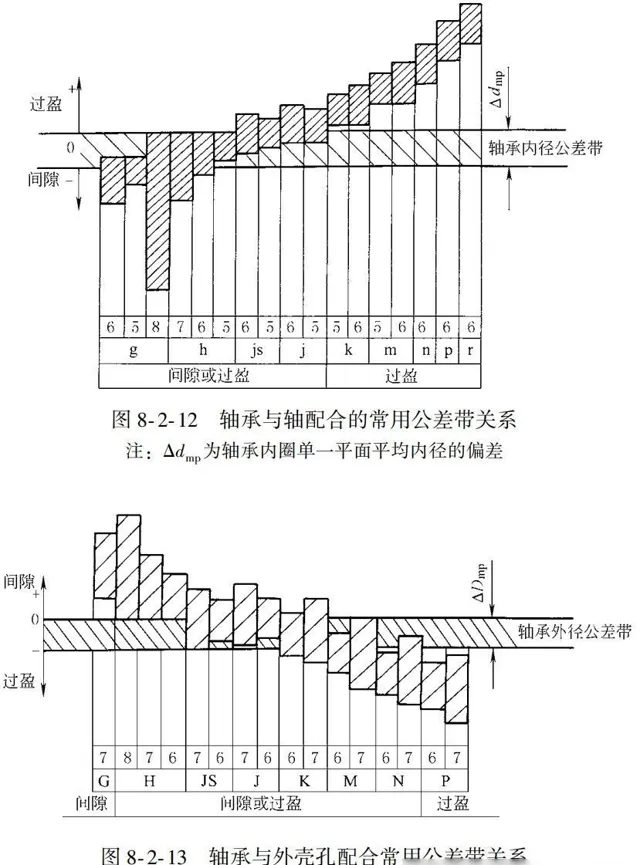
捲動軸承的精度主要根據其尺寸精度(包括內徑d、外徑D和高度B的公差)以及旋轉精度(內外圈相對運動時的跳動程度)來劃分,共分為五個等級。
這五個等級分別是0、6、5、4、2,其中0級精度最低,2級精度最高。需要特別註意的是,推力軸承和圓錐滾子軸承的精度等級略有不同,推力軸承僅有四級(0、6、5、4),而圓錐滾子軸承也為四級(0、6X、5、4)。
在選擇軸承等級時,需綜合考慮轉速n和旋轉精度的要求。
0級軸承適用於一般旋轉機構中的低、中速及旋轉精度要求不高的場景,如普通機床變速箱和普通馬達等。
至此,我們已確定了捲動軸承的公差等級。

總結:透過對捲動軸承的深入了解和精度等級的選擇,我們可以為足式機器人腿部關節的設計提供更為精確和可靠的解決方案。











