【機器人運動控制的關鍵硬體——執行器】
機器人的關節就是執行器。
機器人一般是由執行機構、驅動系統、控制系統和傳感系統這四個部份構成的。機器人要完成工作任務就得靠執行機構這個實體,它常常是由好多連桿、關節或者其他樣式的運動副組合而成的。工業機器人按照臂部運動形式能分成四種:直角座標型的臂部可以沿著三個直角座標移動;圓柱座標型的臂部能夠進行升降、回轉和伸縮這些動作;球座標型的臂部會回轉、俯仰和伸縮;關節型的臂部有好幾個轉動關節。這些運動都得靠執行器來完成。
執行器按運動方式可分兩類,即旋轉執行器和線性執行器。1. 旋轉執行器能把某物旋轉一定角度,這個角度可以是有限的,也可以是無限的。馬達就是旋轉執行器的一個典型例子,它是一種能把電訊號轉變成軸的旋轉運動的執行器。基本電機通上電流時就會旋轉。要是把電機直接連到負載上,就成了直接驅動的旋轉執行器。很多旋轉執行器會和起機械杠桿作用的機構組合(這是優點),這樣能降低轉速並增加扭矩,只要最終結果是旋轉,那這個組合部件的輸出仍然算是旋轉執行器。2. 旋轉執行器還能連線到一種機構上,這種機構能把旋轉運動變成來回運動,這種機構就叫線性執行器。線性執行器主要是讓物體沿直線移動,一般是來回移動。這些機構包括滾珠/滾柱絲杠、皮帶和滑輪、齒條和小齒輪。滾珠絲杠和滾柱絲杠常用來把旋轉運動轉化成精確的直線運動,像在加工中心就會用到。齒條和小齒輪通常能增加扭矩並降低旋轉運動的速度,它們也可以和把旋轉運動轉變成線性運動的機構一起使用。
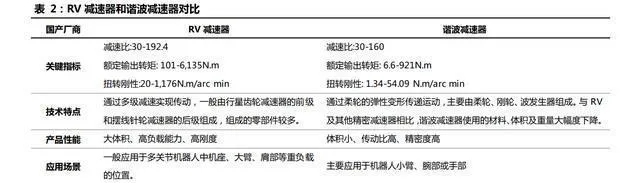
旋轉執行器主要有RV減速器和諧波減速器這兩種:1)RV減速器:RV一般采用擺線針輪,在轉矩大的機器人關節上使用,主要用在負載為20公斤到幾百公斤的機器人上,一二三軸都用RV。RV使用較長時間後精度的保持性比諧波要好。因為RV的零部件更復雜,承載強度更大,制造起來也比諧波更難,所以生產線的資本投入更高。2)諧波減速器:諧波以前主要是漸開線齒形,現在有些廠家用雙圓弧齒形了。諧波能承受的轉矩小,一般用在20公斤以下的機械臂上。諧波裏有個關鍵的齒輪是柔性的,它要反復高速變形,所以比較脆弱,承載能力和使用壽命都不如RV。
絲杠這種傳動副零件能把旋轉運動轉變為直線運動。按摩擦特性來分的話,有滑動絲杠、捲動絲杠和靜壓絲杠。在捲動絲杠裏,依據載荷傳遞元件的不同,又能分成滾珠絲杠和行星滾柱絲杠:1)滾珠絲杠:在傳動機械裏是用得最多、精度最高的傳動裝置。它有摩擦阻力小、傳動效率高、定位精度高、剛性強、能微進給、可高速進給、無側隙、使用壽命長等特點。2)滾柱絲杠:跟滾珠絲杠比起來,滾柱絲杠有著高負載、高剛度和長壽命的長處。行星滾柱絲杠成本高,主要用在高端或者有特殊需求的地方,套用範圍不大,大多是用來替代液壓執行器的。3)梯形絲杠:它和滾珠絲杠的運動原理是一樣的,區別在於梯形絲杠裏沒有滾珠,螺母和絲杠軸之間靠機械接觸產生滑動來運動,這是滑動摩擦,所以梯形絲杠也被叫做滑動絲杠。滾珠絲杠是捲動摩擦,梯形絲杠是滑動摩擦,捲動摩擦的摩擦系數比滑動摩擦系數低得多,大部份滾珠絲杠的傳動效率能達到90%,有的能超過95%,而大部份梯形絲杠的傳動效率在70%以下。
機器人的負荷和工作精度是由執行器決定的。
機器人能勝任什麽工作、最高操作效能怎樣等情況,這些都反映在機器人的技術參數裏。主要有這麽幾個方面:自由度、額定負載、工作空間、工作精度。另外還有工作速度、控制方式、驅動方式、安裝方式、動力源容量、本體品質、環境參數這些參數。
1)自由度:工業機器人的自由度按其用途來設計。機器人的自由度體現其動作的靈活性,自由度越多,就越接近人手的動作機能,通用性也越好,能用直線移動、擺動或者旋轉動作的數量來表示。自由度越多,結構越復雜,對機器人整體的要求就越高。工業機器人將機械臂上的每個關節視為一個獨立的伺服機構,就是說每個軸對應一個伺服器,各個伺服器經匯流排控制,由控制器統一管控協調工作。
2)額定負載,也叫有效負荷。在正常作業的情況下,工業機器人處於規定效能範圍時,手腕末端能夠承受的最大載荷就是額定負載。工業機器人負載的範圍比較大,一般在0.5到2300kg之間。要是負載比較大的話,提高電機功率是不劃算的。可以在合適的速度範圍內,利用減速器來提高輸出扭矩。伺服電機在低頻轉速的時候,容易發熱和產生低頻振動,這對長時間工作的工業機器人來說,不利於保證它精確可靠地執行。精密減速器能讓伺服電機在合適的速度下執行,還能精確地把轉速降低到工業機器人各個部位所需要的速度,在提高機械剛性的同時,輸出更大的力矩。
3)工作精度方面:機器人的重復定位精度由關節減速機和傳動裝置的精度決定,而絕對精度是機器人控制演算法、編碼器精度、減速和傳動裝置精度等多方面綜合的結果。通常,機器人的重復精度比絕對精度要高。想提高機器人的絕對精度就得進行高精度標定。標定分三級:一級是驅動器和關節傳感器的標定,就是明確關節位移傳感器發出的訊號和實際關節位移之間的關系;二級是在一級的基礎上加上機器人幾何參數的標定,這是針對各連桿運動變量誤差和連桿結構參數誤差造成的位姿誤差;三級是非幾何標定,針對的是關節柔度、摩擦、間隙和連桿柔度等因素帶來的誤差。在標定的時候,測量是在參數辨識和補償之前的重要步驟,包含關節位移測量和機器位姿測量。位姿測量方法有接觸式和非接觸式,接觸式測量對機器人位姿的限制比較大;非接觸式測量裏,三座標測量機只能測小型機器人,雷射跟蹤儀對環境比較敏感,操作起來復雜,測量花費的時間也長。
4)工作空間,也叫工作範圍或者工作行程。工業機器人工作的時候,手腕參考中心(就是手腕旋轉中心)能到達的空間區域,這就是工作空間,不過手部自身能到達的區域不包含在內。工作空間常用圖形來表示,P點是手腕參考中心。機器人工作能力的大小,能從工作空間的形狀和大小看出來。工作空間和機器人各連桿的尺寸有關,也和機器人的總體結構有關。工業機器人工作的時候,可能會有手部到不了的作業死區,這樣就沒法完成規定的任務。末端執行器的形狀和尺寸各種各樣,為了能如實反映機器人的特征參數,工作範圍一般說的是不安裝末端執行器時能到達的區域。
總的來說,執行器在機器人裏屬於關鍵零部件,它對機器人的負荷和精度影響很大。減速器呢,是一種能減速傳動的裝置,它可以把轉速降下來,讓扭矩升高,這樣就能傳遞比較大的負荷,把伺服電機輸出扭矩小這個缺陷給克服掉。
Tesla Optimus的關節執行器結構很緊湊,能承受高負載,而且能耗低。
看特斯拉的釋出會,我們預計特斯拉Optimus身體關節有28個,這其中包含三種旋轉執行器(14個)和三種線性執行器(14個)。
特斯拉Optimus旋轉執行器方案的猜測:永磁無刷電機、諧波減速器、抱閘、雙編碼器、力矩傳感器和軸承。諧波傳感器有這些優點:體積小、速比大,能達到160:1,扭矩密度較高。它軸向的尺寸小,能讓執行器關節軸向比較緊湊。在機器人行業裏,多數關節都沒整合扭矩傳感器,這是考慮到成本、整合難度和剛度損失等因素。整合扭矩傳感器的好處是關節更安全,力控演算法也更簡單。
特斯拉Optimus直線執行器方案推測:永磁無刷電機+行星滾柱絲杠+位置編碼器+力傳感器+軸承。線性執行器用於關節有這些好處:1. 空間利用效率高。傳統旋轉執行器是分布在關節周圍的,線性執行器卻能縱向放置,這樣就能最大程度地利用腿部內部空間,能放更大更長的電機,從而產生更大的推動力。2. 有自鎖能力。線性執行器的螺桿傳動機構要是設計得合理,就會有自鎖能力。就是說下半身不動的時候,能自動把姿態釘選,不消耗能量,就像形成了一個功耗低又穩定的底部支架。3. 能耗低、負載高。上肢肘關節屈伸用線性執行器的道理和腿部是一樣的,都是能耗低、推力大。前臂的兩個線性執行器組成並聯關節,主要是為了減小腕關節的尺寸。腕關節細有兩個優點:一是抓東西的時候,能減少關節和工件之間的相互影響,讓抓握路徑更靈活;二是減少前臂對視覺構建以及視覺位置反饋的幹擾,提高控制的精準度。用行星滾柱絲杠能輸出很高的精度和承載能力。行星絲杠的節距能做得很小,所以用小扭矩就能產生很大的推力,電機的功率和體積就可以小一點。電機的轉子是整合在螺母上的,整體結構更緊湊。2.2千克的執行器能輸出8000牛的力,推力密度很高。
【人形機器人旋轉執行器:需求彈性及供給能力分析】
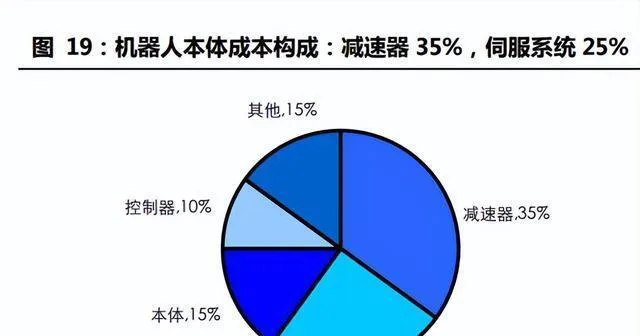
在工業機器人裏,減速器的成本占了35%,這是成本構成裏占比最高的,價值量也是最高的。預計在人形機器人裏,它的價值量占比也會比較高。工業機器人是這麽控制的:控制器給伺服驅動發指令,伺服驅動就讓伺服電機轉起來,然後透過減速機來執行動作。在工業機器人上遊的三個大部件裏,減速器的成本占比最高,達到35%,伺服系統(伺服電機加伺服驅動器)占25%,控制器占10%。
人形機器人產業化時,對諧波減速器需求有多敏感?分析一下。
2017 - 2021年,精密減速器(諧波加上RV)的銷量從49萬台漲到了101萬台,復合增長率是19.8%。工業機器人用的精密減速器銷量呢,從41萬台增長到84萬台,復合增長率為19.5%,2021年的時候這個占比達到了82%。2018 - 2021年,精密減速器的市場規模從57.7億元增加到59.5億元,復合增速是1%,這和國產替代速度變快、均價下降是有關系的。人形機器人運動執行部件也許會把諧波減速器當作主要執行部件之一。我們假定人形機器人不同的年銷售規模,來對諧波減速器的需求彈性做敏感性分析。核心的假設如下:1. 這次測算假定人形機器人的年銷量在10到100萬台之間;2. 每台人形機器人配14個諧波減速器;3. 馬斯克在特斯拉開放日說過,特斯拉人形機器人最終售價會降到2萬美金以下,從目前產業鏈的成本來看,還有很大的降本空間。我們暫時不能對產業鏈各個環節成本下降的振幅和速度做假設,我們覺得,技術成熟以及產業鏈成本下降是產業化的前提,規模化是技術成熟和成本下降後的必然結果。
就現在知道的資訊來說,人形機器人用RV減速器的可能性比較小。所以呢,我們就不對RV減速器做敏感性分析了。估計RV減速器以後主要還是用在工業機器人上。
諧波減速器的供給格局:國產化速度加快。
哈默納科是世界上最大的諧波減速器生產商,全球市場占比超80%。諧波傳動最早用在美國航天運動控制方面,谷川齒輪把它引入日本還搞了量產,1970年哈默納科就成立了。這五十多年來,它不斷進行技術更新,海外業務也不斷擴張,就這麽壟斷了全球諧波減速機市場,產品種類也越來越多,像精密減速機(有諧波減速器、減速器元件和行星減速器),還有機電一體化產品(像執行器、控制器)。2021年哈默納科營業收入是570億日元,2000年到2022年的年均復合增速是8.3%,這個速度和全球工業機器人行業的增速差不多。它的毛利率大概穩定在40%左右,凈利率也保持在20%以上。
國內諧波減速器發展得很快,綠的諧波最先打破壟斷局面,同川、大族也趕緊跟上,雙環、中大力德、國茂股份也開始涉足這個領域了。中國的諧波減速器廠商起步的時間比較晚,不過因為中國工業自動化對工業機器人的需求很旺盛,國產諧波減速器就得以快速發展起來,這些年國產替代的速度也加快了。2021年的時候,哈默納科在中國諧波減速器市場占的份額是38%,跟2018年的52%相比,明顯下降了。以綠的諧波為代表的國產諧波減速器,市場份額提升得很明顯。隨著這個行業蓬勃發展,國內新加入的企業變多了,日本新寶、台灣來福的份額比較穩定,同川、大族這些企業也占了一定的市場份額,中大力德、國茂股份、光洋股份也參與到競爭當中,國內的產能建設速度也加快了。國產諧波減速器用價格換數量,高端產品技術突破是關鍵。諧波減速器結構不復雜,要是對壽命要求不高的話,進入這個領域的門檻就比較低。疫情期間,外資廠商供貨周期長,國產品牌抓住這個市場機會快速增加出貨量,不過產品大多集中在中低端市場。國內企業憑借本土優勢能提供價格低的諧波減速器,2021年均價大概2000元,哈默那科的諧波減速器進口單價大多在8000元及以上,國內企業靠著一定的價格優勢在銷量上表現很好。根據MIR的數據,2021年綠的諧波、來福減速器的銷量分別是17.8萬、9.5萬台,遠遠超過哈默納科的3.5萬台。

RV減速器的供給情況是:國產品牌正在努力突圍。
納博特斯克是全球最大的RV減速器制造商,在全球市場占的份額超60%。它的前身是日本帝人制機和納博克株式會社,2003年這兩家公司合並,成了控股公司納博特斯克的全資子公司。1980年的時候,日本帝人精機把RV減速器用在了機器人行業,這就解決了工業機器人容易被沖擊損壞、手臂振動之類的問題。1986年開始,RV減速器就在工業機器人領域大規模套用了,正好趕上日本「機器換人」的潮流,這就奠定了它在行業裏領先的地位。納博特斯克的營收一年比一年穩健增長,2003年到2022年期間,年均復合增速是4.9%。營收從2003年的1250億日元漲到了2022年的3080億日元,2022年的毛利率是5.9%,凈利率是24.8%。
2021年的時候,納博特斯克在中國占的份額是52%,國產品牌份額超30%。像中大力德、秦川機床、南通振康、珠海飛馬、智同科技這些企業,規模都比較靠前。南通振康在2010年就做出了第一台RV減速器,雙環傳動和中大力德呢,大概在2013年左右開始搞工業機器人精密減速器的研發。經過了十多年的技術積攢,還有產品種類的拓展,雙環傳動的市場份額漲得挺明顯的,從2018年的7%漲到了2021年的15%。國內規模比較靠前的企業有中大力德、秦川機床、南通振康、珠海飛馬、智同科技這些。
機器人的軸承供給格局:主要靠進口。
工業機器人專用的軸承包括等截面薄壁軸承、薄壁交叉圓柱滾子軸承、RV減速機軸承還有諧波減速器用的柔性軸承等,這些軸承大多遵循非標準、多捲動體之類的設計原則。
國內工業機器人用的軸承大多得靠進口。國內有一小部份廠家也生產工業機器人配套軸承,可產量不大,品種和規格也少,零部件通用性差,供貨要花很長時間,成本還高,品質也不穩定。最近這幾年,中國軸承廠商的制造能力提高了不少。做機器人配套軸承研發的主要廠商有:人本軸承、國機精工、洛陽LYC軸承公司、北京諧波技術研究所、洛陽匯工軸、五洲新春。
【線性執行器:需求彈性及供給能力分析】
人形機器人產業化時對線性執行器的需求敏感性分析
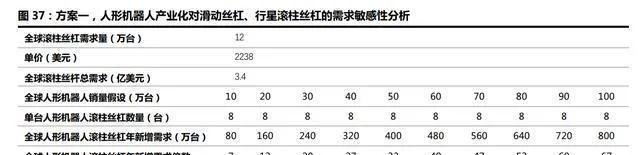
2022年的時候,全球滾珠絲杠市場規模達到了20.4億美元。要是不把人形機器人產業化考慮進去的話,這個行業應該會保持比較低速的穩定增長。預計到2029年,市場規模能達到30.9億美元,2023年到2029年這期間的復合增速是6.1%。亞太地區是最大的消費市場,占了58%的市場份額,歐洲排在第二位。咱們來假設人形機器人不同的年銷售規模,對滾珠絲杠、滾柱絲杠、滑動絲杠的需求彈性做個敏感性分析。核心的假設如下:第一,這次測算假設人形機器人的年銷量是在10萬到100萬台之間;第二,每台人形機器人配備14個諧波減速器;第三,特斯拉到現在還沒公布它的線性執行器具體方案,我們推測可能存在兩種方案,方案一是4個滑動的加上8個行星滾柱絲杠,方案二是14個滾珠絲杠;第四,馬斯克在特斯拉的開放日提到,特斯拉人形機器人最終的售價會降到2萬美金以下,從目前產業鏈的成本來看,有很大的降價空間。我們暫時沒辦法對產業鏈各個環節成本下降的振幅和速度進行假設,我們覺得,技術成熟以及成本下降是實作產業化的前提,而規模化是技術成熟和成本下降之後必然會出現的情況。
滾珠絲杠的供給格局是這樣的:高端市場由外資主導,中低端市場已經實作國產替代了。
滾珠絲杠的主要供應商大多在日、德、台這幾個地方,其中NSK在全球滾珠絲杠市場占的份額是最大的。全球市場被日本的NSK、THK等企業把控著,CR5大概是46%,日本和歐洲的企業加起來在全球占了差不多70%的市場份額。在國內市場,上銀和銀泰的占有率快到50%了,NSK、THK的市場占有率大概是15%,國內企業的占有率約為25%。國產企業開始得晚,產業規模不大,產品種類少,生產效率也不高,還沒有做出在國際上有影響力的品牌,主要的廠商有南京工藝、博特精工、合肥賽裏斯(江蘇雷利)、鼎智科技(江蘇雷利)、華歐精密等。國產滾珠絲杠在中低端的套用基本上已經能替代國外產品了,產品種類和技術指標跟外商比起來差得不多。在高端產品方面,滾珠絲杠在精度、最高速度、噪音、溫升等的控制上以及精度的保持性還需要提高,在高端細分市場,國產滾珠絲杠副已經開始被機床企業批次使用了,像秦川機床、海麥克精密,貝斯特和恒力液壓也在安排相關產品的布局。
滾柱絲桿的供給格局是,國內才剛剛起步。
70年代的時候,武器裝備技術以及石油、化工、數控機床這些方面,對大推力、高精度、高效率、長壽命的要求越來越高,行星滾柱絲杠就開始被大量使用了。1970年開始,瑞士的ROLLVIS公司(後來被GSA收購了)就專門搞行星滾柱絲桿產品的制造和研究。美國的EXLAR公司把行星滾柱絲杠當作六自由度並線上構的傳動裝置,做出了一種新的電推桿,行星絲杠的商業套用就加快了速度,現在主要用在航空航天、武器裝備這些軍事方面,還有數控機床、工程機械這些民用方面。在行星滾柱絲杠的市場上,全球主要的制造業國家和瑞士比起來差距很大。國外有能力生產行星滾柱絲杠的企業主要是GSA、SKF、EWELLIX、MOOG這些。GSA公司的行星滾柱產品系列是最全的,規模也是最大的,在裝配、加工工藝、材料以及熱處理工藝上有很多的經驗積累,不管是產品覆蓋的規格、生產規模,還是產品生產經驗的積累,對其他地區都有很大的優勢。
國內行星滾柱絲杠才剛剛起步,只有博特精工、常州思科瑞、南京工藝等寥寥幾家企業有小批次生產的能力。2010年的時候,博特精工、南京工藝、常州思科瑞這些國內廠商開始搞行星絲杠的研發,到現在已經能小批次生產了。不過國產的行星絲杠在承載能力和產品尺寸覆蓋範圍方面還有不足,產業化和規模化還處在早期水平。
【技術壁壘:設計、材料、工藝、加工】
減速器、絲杠、軸承這類精密產品及其零部件,在設計、材料、工藝和加工精度方面存在技術壁壘,這些最終會在產品效能上體現出來,像產品的精度保持度、壽命、故障率等。國產減速器和海外產品在效能上的差距,就表現在壽命和精度保持性上。在效率、減速比、傳動精度、扭矩剛度這些關鍵指標參數方面,國產減速器差不多已經達到國際領先產品的水平了,不過在疲勞壽命、故障率、批次產品的穩定性上還存在差距。從官網數據來看,納博特斯克銷量最高的RV - C和RV - E系列,額定輸出轉矩和減速比都更高,壽命能達到6000小時以上。和國外產品比起來,國產減速器用久了還是會有磨損、漏油、精度下降的情況;國產諧波減速器在高速執行時容易斷裂,在產品穩定性和使用壽命上還得提高。
減速器的效能和嚙合原理、齒形設計、結構最佳化有關,也和原材料、加工、熱處理工藝這些因素有關。在效率、減速比、傳動精度、扭矩剛度這些關鍵指標參數上,國產減速器差不多達到國際領先產品的水平了,不過在疲勞壽命、故障率、批次產品的穩定性方面還有差距,這也和嚙合原理、齒形設計、結構最佳化有關,還和原材料、加工、熱處理工藝等因素有關。這一章咱們主要拿諧波減速器舉個例子,講講高精度核心部件的技術壁壘。
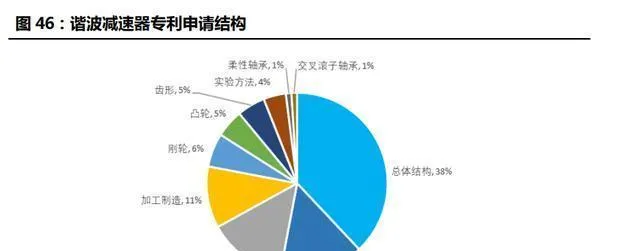
諧波傳動技術包含10個分支,分別是總體結構、柔輪、剛輪、凸輪、柔性軸承、交叉滾子軸承、齒形、波發生器、加工制造以及試驗方法。從專利申請的數量上看,總體結構、波發生器、柔輪和加工制造是諧波減速器技術研發的重點。
1)波發生器(柔性軸承):減速機廠家通常從軸承廠家購入標準柔性軸承,質檢合格後,將其壓入自己設計加工的凸輪,這樣就制成了波發生器。凸輪:用廠家標準品的話,貨期和價格都比較理想,不過,因為電機的軸徑、長度、安裝方式不一樣,很多廠家會對凸輪提出客製要求。進口品牌的減速機大多會深度客製,而現在國產品牌規模小,很難搞客製。柔性軸承關鍵是材料和熱處理的問題,得承受球體壓力,還得承受高速運動產生的變形。太軟的話,溝道容易壞;太硬的話,軸承容易斷。凸輪主要是加工方面的問題,其實目前國內的加工水平完全能達到要求,就是後期批次生產時,怎樣選擇加工工藝才能價效比最高。
2)剛輪:其主要生產過程有下料、熱處理、外形加工、齒加工等。打樣時通常會用40Cr棒料來加工,量產的時候以進口球墨鑄鐵為主,主流廠商會包爐。批次生產大多采用滾齒,成型後,會對齒做加強處理,主要是用噴砂或者滲氮工藝,為的是增加硬度和耐磨性。
3)柔輪常用40CrNiMoA這種材料,不過也會有一些微量添加的情況。廠家一般是拿棒料,下好料後先鍛造再加工。和剛輪比起來,柔輪加工有三個最大的難點:其一,柔輪精加工的時候壁特別薄,得防止變形和抖動,這就需要專門的治具把內壁撐住;其二,得想辦法控制竄刀量,保證柔性軸承壓進去之後剛好能把齒撐起來;其三就是齒的修型問題。天下的齒型基本出自HD,只有極少數廠家有能力設計新齒型。
4)交叉滾子軸承:諧波減速器專用的十字交叉軸承,剛度很高,旋轉精度也高,復合承載能力強,而且外形緊湊。精密軸承是制造業裏的關鍵零部件,機器人配套軸承是軸承套用的一個細分領域。機器人用的精密軸承有這些:諧波減速器專用十字交叉軸承、柔性軸承、RV減速器軸承、交叉滾子軸承、等截面薄壁軸承等等。
5)油封和潤滑這塊,這都是很成熟的零部件了。不過大廠家往往會客製油封來提高效能。諧波的潤滑方式有油潤滑和脂潤滑這兩種。油潤滑呢,流動性不錯,所以潤滑效果好,熱傳導也好,能提高轉速,但是對密封的要求特別高。現在只有HD采用油潤滑,所以也只有HD能做高速諧波。除了HD,別的廠家一般都用脂潤滑。
設計方面,齒形設計與傳動結構設計是關鍵所在。
諧波方面:綠的、來福在齒形設計和傳動結構上,避開了哈默納科的專利。哈默納科是諧波領域的龍頭企業,它先發制人地對齒形設計和傳動結構申請了專利。國產的綠的諧波有P齒形,來福諧波有δ齒形,這率先打破了壟斷,差不多能滿足諧波減速器的效能要求。不過新進入這個領域的廠商要設計出效能優良的齒形是很難的,因為得避開專利限制。RV方面:擺線齒輪修形的理論不完善。國內企業對擺線齒輪修形原理大多是靠經驗數據,沒有足夠完整的理論依據。這就使得齒型修形得不斷嘗試改進,增加了研發時間,而且改進效果還不明顯。另外,RV減速器的結構復雜,零部件在設計上的配合以及細節參數的最佳化,這些都是影響減速器精度的重要因素。
材料和零部件長期靠進口。
諧波減速器的柔輪材料一直以來都得靠進口。不管是國內還是國外,諧波減速器的柔輪材料大多是40Cr合金鋼,這裏面40CrMoNiA和40CrA是最常用的。要是晶粒和鐵氧體相不合理的話,就會出現局部微裂紋,尺寸精度也會有變化,所以對材料純度要求很高。同樣的原材料,國外提純技術好,雜質少,這樣一來,國產諧波減速器的材料就只能長期依賴進口了。

RV減速器這塊兒,國產軸承在精度方面還有不小的差距呢。RV減速器的原材料有齒輪鋼(像20CrMnTi、20CrMo、20MnCr5之類的),還有軸承合金等。國內齒輪鋼的生產水平已經接近國外先進水平了,不過和日本、德國、美國生產的齒輪鋼比起來還是有點差距的,比如淬透性寬、純度低這些問題。在外購零部件這塊,有些廠商會選擇購買軸承、密封圈、滾針、擋圈等零部件。軸承對產品精度影響很大,國產軸承在精度上還是差得比較多的。
工藝得靠經驗慢慢積累。
熱處理工藝對提高減速器疲勞壽命和精度穩定性特別關鍵。根據目的的差異,熱處理工藝通常分為預備熱處理與最終熱處理。預備熱處理是用來改善材料加工效能、消除內應力的,像退火、正火、時效、調變等就是主要的預備熱處理工藝;最終熱處理呢,目的是改善材料的硬度、耐磨性等,進而提高減速器疲勞壽命和穩定性,淬火、滲碳淬火、滲氮處理等屬於主要的最終熱處理工藝。諧波方面:柔輪失效是諧波減速器的主要失效形式中的一種,這對諧波減速器的使用壽命有很大限制。柔輪的壁比較薄,而且要承受波發生器和外部載荷這兩方面的作用,所以良好的熱處理工藝是確保材料結構組織一致的必備條件。國產廠商在柔輪的熱處理工藝、慢走絲、連續切割等加工工藝上存在差距,而這些正是決定減速器精度和壽命的關鍵所在。
RV呢,它的設計比較復雜。像擺線輪、偏心軸、針齒殼這些核心部件,加工起來都特別難。最核心的難點就在於各種工藝得緊密配合,像加工精度啊、零件對稱性、成組技術、裝配精度這些方面。熱處理技術是國內廠商的一個大問題,技術要是不行的話,產品就會變形,硬度也不夠。工藝上的差距呢,就造成了產品在精度、損耗速度和壽命方面的差距。這也對操作人員的技術要求很高,操作人員得能根據各種條件的變化及時調整,這樣才能保證成品率。
滾珠絲杠主要有兩種制造工藝:軋制和磨制。軋制是批次制造,精度低些,不過生產效率高,裝置門檻比磨制高。中國磨制絲杠發展得早,非標要求高,規格產品挺齊全的。從開始只能滿足部份非標需求,到現在差不多能滿足所有使用場合了。像低噪音、低摩擦、多載低速、高速,還有註塑機用的多載專用絲杠這些情況,基本都國產化了。軋制絲杠起步晚,近年才形成完整的體系產業鏈,已經能把低端的中國台灣品牌替換掉了。而且像小導程、特殊材料、機電整合化絲杠這些細分產品,也基本形成了體系產業鏈。
熱處理、磨齒機、三座標等檢測裝置依賴進口,這些都是關鍵裝置。
磨齒機、高精度三座標檢測裝置還有齒輪檢測裝置,這些都是提高減速器齒輪精度的重要裝置。在諧波減速器的加工時,得用到齒輪加工機床、三座標測量機、加工中心、磨床、車床、熱處理裝置等這些裝置。RV減速器加工得用齒輪加工機床、加工中心、車床、磨床、硬拉床、三座標測量機、熱處理裝置等裝置。在實際情況裏,RV減速器得反復精確定位,所以對加工裝置的精度要求很高,不然產品就會磨損。a. 加工裝置:像偏心軸、擺線輪、針齒殼、行星架等這樣的核心零部件,它們最後的精加工裝置得靠進口。咱們對這些核心關鍵裝置就只是會用,要是工藝有新要求或者要不斷最佳化的時候,國內的廠商就不能很快做出反應。b. 專用工裝:裝置供應商一般不會給一整套高精度的工裝裝置,所以自己設計制作工裝是加工出高精度零部件的又一個重要因素。c. 檢測裝置:高精度三座標檢測裝置、齒輪檢測裝置,還有相關的材料檢測裝置,這些能保證齒輪品質和尺寸準確無誤,是高精度RV減速器的關鍵。
熱處理的裝置。
國內中高端的熱處理裝置得靠進口。減速器熱處理產線一般是客製的,有些企業把這部份業務外包加工。國內熱處理行業發展程度比較低,中高檔熱處理裝置一直以來都依賴進口。2017 - 2021年期間,中國熱處理裝置制造行業的進口額在2000萬美元上下浮動。2019 - 2021年,這個行業的進口金額逐年增多,2021年進口金額達到了23391.03萬美元,跟上年比增長了16.10%。2017 - 2021年進口數量每年的增長率都在80%以上,2021年達到了51404台,同比增長83.36%。

國產熱處理裝置在裝置穩定性、資訊化程度和產線整合能力等方面還有差距,不過部份廠家的部份裝置技術水平已快趕上國外中高端產品水平了。海外在熱處理裝置及服務方面領先的公司有愛協林、應達、易普森、易孚迪、日本高周波、德國ALD等。國內感應熱處理裝備制造商裏綜合實力比較強的公司有上海恒精機電裝置有限公司、天津天豐淬火裝置有限公司、洛陽昇華感應加熱股份有限公司、十堰恒進科技有限公司、十堰天舒機電科技有限公司。在這些公司裏,上海恒精機電裝置有限公司、洛陽昇華股份有限公司、十堰恒進科技有限公司的一些裝置技術水平已接近國外中高端產品水平,正慢慢取代進口產品。
磨床精度很高。
高精度磨床一直都靠進口,秦川機床、重慶機床、南二齒在磨齒機國產替代方面是龍頭。按齒輪加工工藝來看,齒輪機床包含滾齒機、插齒機、銑齒機、剃齒機、珩齒機、磨齒機等系列。齒輪加工的工序很復雜,不同工序對精度的要求不一樣。通常,決定減速器齒輪精度的是熱處理後的精加工環節,這個環節主要靠磨齒機(沒經過磨齒的齒輪,精度最高只能到6級,而磨齒機加工過的齒輪,精度最高能達到2級),這種裝置長期靠進口,像萊斯豪爾、格裏森、Kappa耐爾斯、日本電產等公司的產品。秦川機床是國內磨齒機的龍頭企業,有希望實作高端裝置的國產化替代,它的YKS7225雙工位高效磨齒機精度能達到國標GB/T10095 - 2008中的4級;重慶機床、南二齒也有磨齒機生產能力,重慶機床的YS7232/YS7232G高精密數控蝸桿砂輪磨齒機批次加工精度能達到4 - 5級。
三座標高精度的、齒輪檢測裝置高精度的。
高精度三座標的國內產品和國外產品有差距,主要在三個方面:1)精度等級方面,進口的精密計量型測量機檢測精度能在0.5微米以內,國產裝置最多就到0.8微米,而且測量行程沒有進口的長。2)進口機型在結構設計和材料方面是多方向發展的,國內好多廠商的產品呢,結構和材料都差不多,沒什麽創新能力。3)進口機型的控制系統、測頭和測量軟體等,一般都有自主智慧財產權,核心技術基本都掌握了;但大多數國產機型除了機械本體,關鍵部份用的是國外品牌,自主研發能力不強,缺核心技術。國際上比較有名的測量機生產廠家有瑞典海克斯康、德國蔡司、德國溫澤和日本三豐等,計量型測量機市場主要被蔡司、海克斯康壟斷。中國三座標測量機的主要生產廠商有303所、西安愛德華、青島雷頓、集萃華科等。
產品的SKU豐富度和客戶黏性
國內的減速器廠商,產品矩陣的豐富度(SKU)比不上海外廠商,這得靠時間和技術慢慢積累才行。哈默納科、納博都成立了半個多世紀了,在減速器這類產品上底蘊深厚。哈默納科的諧波減速器產品有15個系列,總共49款,像空心軸減速機、微型減速機等多種樣式都包括在內;綠的諧波呢,只有6個系列共19款產品。納博特斯克有3個系列共25款RV加速器,雙環傳動下面是2個系列共12款RV減速器。不管是RV還是諧波減速器,國內廠商在產品種類的豐富程度上都有差距,而且這不是短期內就能補上的,得在技術、專利方面不斷積累,也需要時間。
(這篇文章僅供參考,不表示我們有任何投資方面的建議。要是想使用相關資訊的話,請檢視報告原文。)
精選報告來源:【未來智庫】。「連結」











