鳥類羽毛復雜的結構可適應機翼變形,這激發了人們對具有高機動性、靈活性和隱身性的羽毛撲翼飛機的興趣。然而,要在嚴格的重量限制內模仿鳥類的綜合軀體感知仍然具有挑戰性。
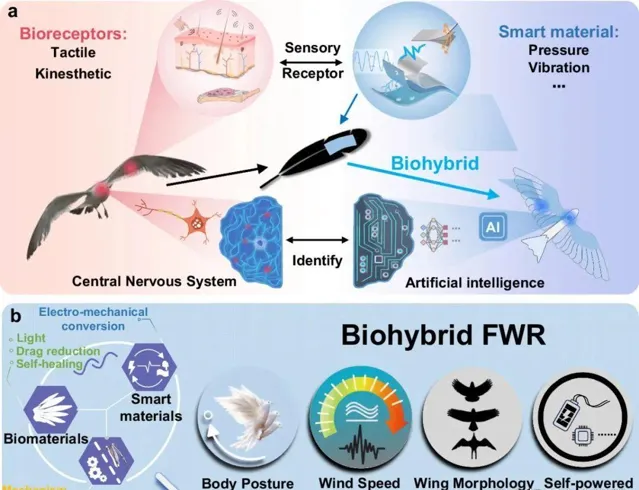
生物混合撲翼機器人系統設計示意圖
近日上海交通大學海洋與土木工程學院工程力學系、海洋工程國家重點實驗室以及上海交通大學機械工程學院機械系統與振動國家重點實驗室開發團隊聯合打造了一款羽毛-壓電生物混合感知方法的撲翼機器人,該機器人具備環境感知和自主飛行能力,不僅具有輕量化、高靈敏度和高精度等優點,還透過模仿鳥類的感知系統,實作了觸覺和本體感知的同源融合。
▍ 羽毛-壓電生物混合機械傳感器設計方法
在設計羽毛-壓電生物混合機械傳感器時,研究人員巧妙地將羽毛的自然振動結構與壓電材料的柔性特性相結合,從而實作了對微妙振動和表面載荷的高靈敏度感知。
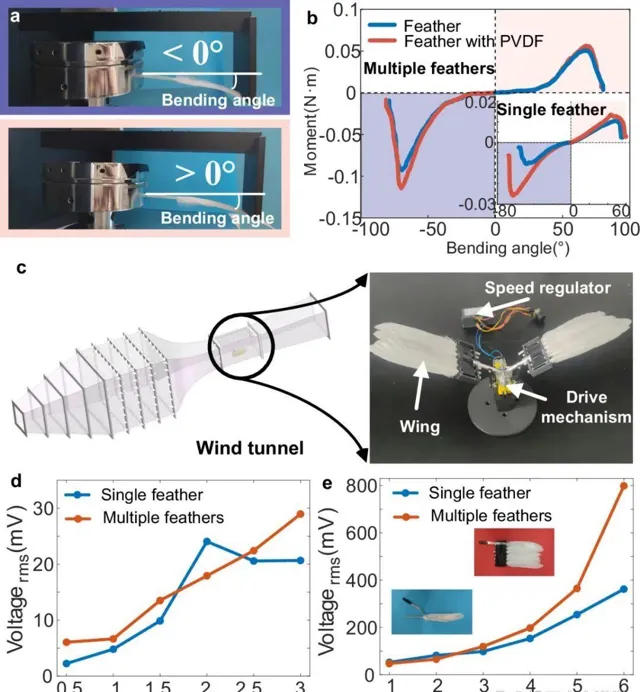
羽毛-PVDF 生物混合機械傳感器的機械和電效能測試
在材料的選擇上,研究人員使用了鵝的翼羽作為基材,這些羽毛具有獨特的階層和優良的力學效能。在羽毛的羽軸方向,研究人員固定了多層結構的壓電聚偏二氟乙烯(PVDF)薄膜。PVDF作為一種柔性壓電材料,能夠響應外界壓力或振動,並將機械能轉換為電能。這種設計使得機械傳感器能夠感知羽毛上的微小振動,並透過壓電效應將這些振動轉換為可測量的電訊號。
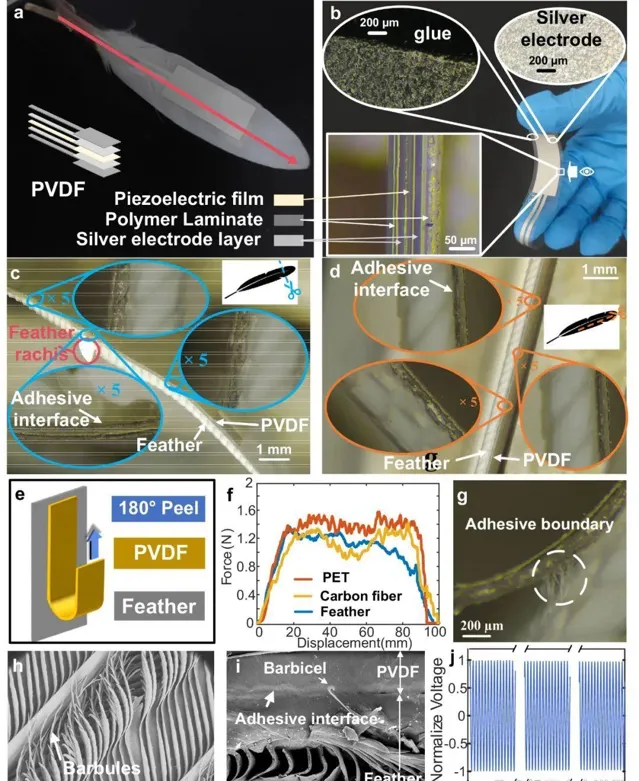
羽毛-PVDF生物混合機械傳感器的特性和效能測試
羽毛與PVDF之間的界面連線特性對於機械傳感器的效能至關重要。為了確保兩者之間的緊密粘附,研究人員對界面進行了微觀表征和效能測試。從結果來看,PVDF與羽毛之間形成了緊密的粘附,展現出優異的剝離強度和耐久性。這種優異的界面連線特性不僅保證了機械傳感器的穩定性,還提高了其響應速度和靈敏度。
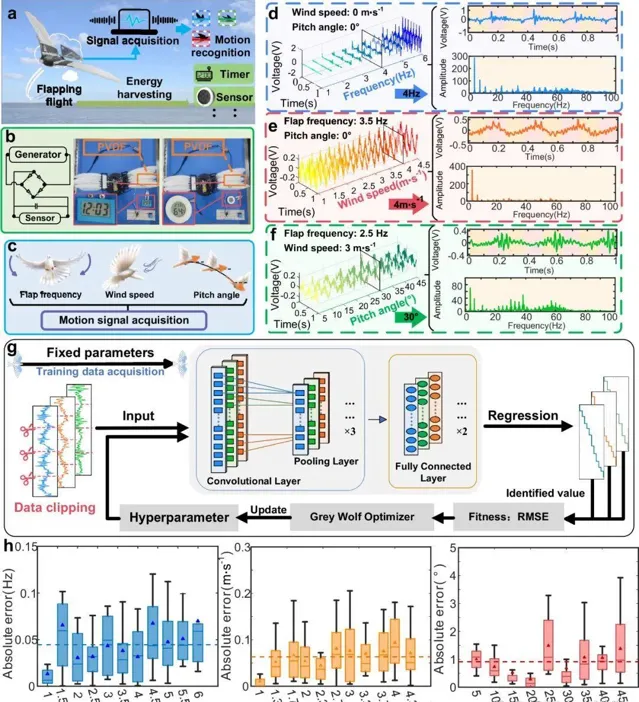
羽毛-PVDF生物混合機械傳感器用於體現能量和電壓訊號采集,以及摺積神經網路-灰狼最佳化演算法用於體現感知辨識
在感知演算法方面,研究人員采用了摺積神經網路(CNN)和灰狼最佳化演算法(GWO)的組合。摺積神經網路作為一種深度學習模型,具有出色的特征提取能力,能夠從復雜的電訊號中提取出有用的資訊。而灰狼最佳化演算法則是一種基於自然行為的最佳化演算法,能夠快速、準確地探索搜尋空間,找到最優的網路參數。透過結合這兩種演算法,研究人員開發了一種高效、精確的感知演算法,能夠即時辨識和視覺化撲翼頻率、風速、俯仰角和翼形等飛行參數。
▍ 實驗驗證與結果分析
為了評估羽毛-壓電生物混合機械傳感器的機械和電氣效能,研究人員采用了多項實驗進行驗證。
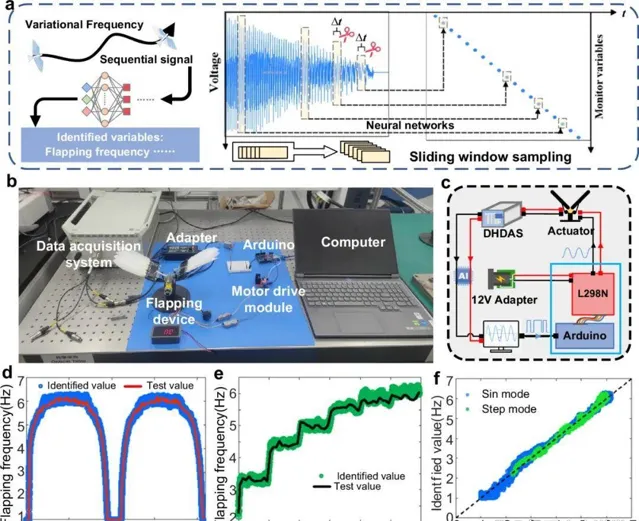
連續時間內頻變運動訊號辨識實驗
在彎曲實驗中,研究人員分別測試了單個羽毛和多羽毛翼結構在不同彎曲角度下的扭矩-彎曲角度曲線。結果顯示,附著有PVDF薄膜的羽毛結構表現出更高的彎曲承載能力,尤其是在下沖程運動中,負向最大扭矩的增強效果更為顯著。該實驗充分證明,PVDF薄膜的加入顯著提高了羽毛結構的機械效能,使其能夠更好地承受氣動載荷。
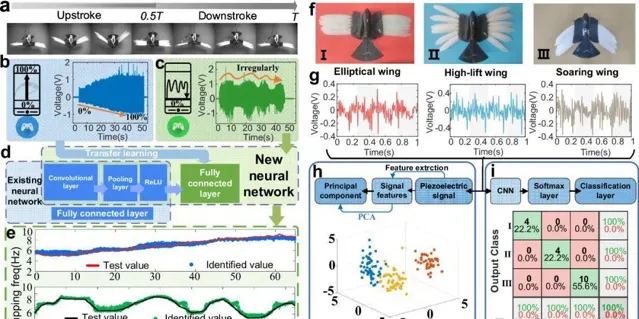
羽毛撲翼機器人的撲翼頻率運動和翅膀形態的辨識
風洞模擬飛行實驗當中,研究人員測量了不同風速和撲翼頻率下PVDF的均方根電壓。結果顯示,隨著風速的增加,單個羽毛結構的均方根電壓先增加後減少,而多羽毛翼結構的均方根電壓則整體呈上升趨勢,從分析的結果來看,多羽毛翼結構在風速辨識方面更具優勢。而隨著撲翼頻率的增加,兩種結構的均方根電壓均呈現增加趨勢,但多羽毛翼結構在高頻下的電壓增強效果更為顯著。
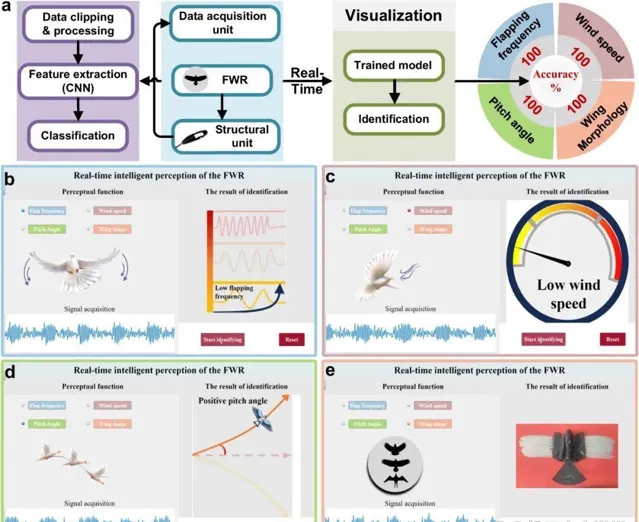
羽毛撲翼機器人即時辨識過程、結果及視覺化界面
在感知演算法驗證方面,研究人員利用摺積神經網路和灰狼最佳化演算法對采集的電壓訊號進行了處理和分析。研究人員首先透過CNN提取訊號特征,並利用GWO最佳化演算法找到最優的網路參數。之後采用最佳化後的CNN模型對飛行參數進行回歸辨識。結果顯示,該演算法在撲翼頻率、風速和俯仰角辨識方面均表現出色,平均絕對誤差分別為0.043Hz、0.064m/s和0.910°。這些誤差值遠低於同類研究中的水平,證明了團隊采用的感知演算法具有極高的準確性和魯棒性。
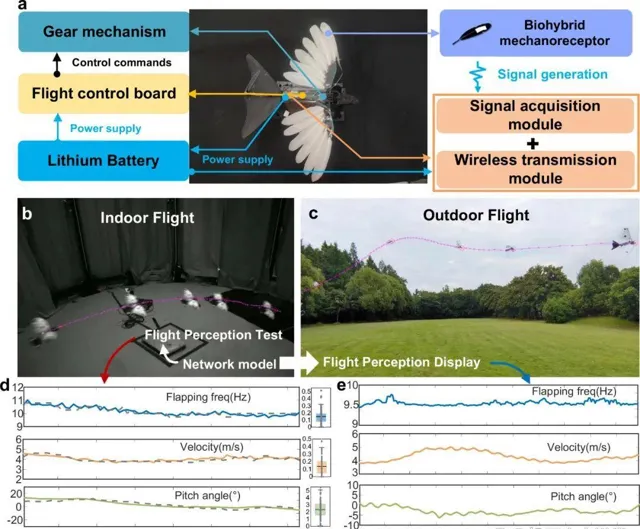
羽翼撲翼機器人的飛行測試
為了進一步驗證生物混合感知系統在實際套用中的效能,研究人員在撲翼機器人上部署了該系統,並進行了即時感知測試。研究人員利用高速攝影機和數據采集系統即時收集和分析數據,並透過GUI界面即時顯示辨識結果。實驗結果顯示,該系統能夠準確地辨識撲翼頻率、風速、俯仰角和翼形等關鍵飛行參數,辨識準確率高達100%。
此外,研究人員還進行了無繩飛行測試,以評估該系統在實際飛行環境中的效能。研究人員利用運動捕捉系統對飛行軌跡進行即時監測,並將采集的數據與感知系統的辨識結果進行對比。結果顯示,兩者在撲翼頻率和風速辨識方面表現出高度一致性,俯仰角辨識誤差也在可接受範圍內。充分印證了生物混合感知系統在實際飛行環境中的有效性和可靠性。
▍ 結語與未來:
研究人員表示,隨著多模態大模型以及生物混合感知技術研究的深入,撲翼機器人有望在更多復雜環境中實作自主飛行和智慧互動。同時,該方法還可套用於鳥類行為監測和生物研究等領域,為生態保護和科學研究提供新的手段。後續團隊會持續對輕量級數據采集與傳輸系統的開發、多功能執行器的設計以及智慧演算法進行最佳化,滿足多元化場景使用。











