海底探測作為揭示海洋環境、氣候變遷及地球演化奧秘的重要途徑,其重要性日益凸顯。在這一探索過程中,海底采樣機器人扮演著舉足輕重的角色,它們能夠精準獲取沈積層樣品,為地質調查、資源探測等多領域研究提供寶貴資料。對這些珍貴樣品進行深入分析,為我們揭開海洋的更多未解之謎提供關鍵線索。
然而,盡管過去幾十年來,一些研究機構致力於開發高效的海底沈積層取樣機器人,但這一領域至今仍未形成完善的體系。 前不久,來自廣東工業大學、北京航空航天大學的研究團隊 為更深入了解當前海底沈積層取樣機器人的研究進展,就海底沈積層取樣機器人的基本概念、歷史演變、面臨的約束條件、關鍵技術以及未來的發展趨勢等內容進行了全面梳理,為這一領域的研究提供了全面而深入的概述。

圖1 論文出版資訊
梳理內容的相關成果已以「Progress and Perspective of Seafloor Regolith-Sampling Robots for Ocean Exploration」為題發表在【Journal of Field Robotics】上 。 劉家斌為第一作者,葉旻輝、朱海飛、管貽生為共同作者,張濤為通訊作者。
那麽,海底沈積層取樣機器人當前具體發展如何呢?接下來和機器人大講堂一起深入了解!
▍什麽是海底沈積層取樣機器人?
地球並非一個簡單的均質球體,而是由多個具有顯著差異成分的同心層次構成。對於預測與闡釋地質活動而言,深入理解地球內部結構的精細差別至關重要。在這方面,深海地質樣本的分析為我們提供了寶貴的洞見。
海底采樣,作為地質調查領域的關鍵組成部份,在推動海洋科學研究方面發揮著至關重要的作用。當前, 海底鉆探取樣機器人作為新一代海底取樣技術的典型代表,已在全球範圍內得到廣泛套用, 深入海底進行地質取樣。這一技術不僅在海洋地質調查中占據核心地位,還對環境科學研究以及海洋與礦產資源的勘探工作做出了重要貢獻。
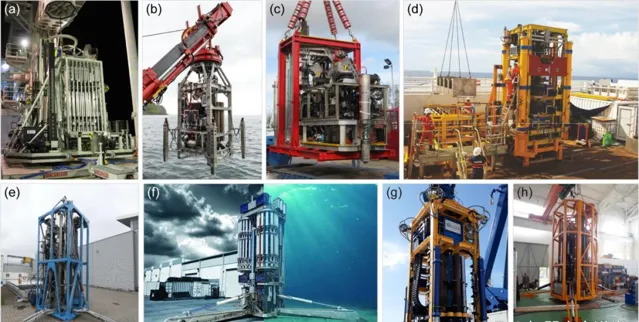
圖2 代表性海底鉆探取樣機器人:(a)A-BMS ;(b)RockDrill 2;(c)ROV Drill Mk.2 ;(d)ROV Drill 3;(e)Mebo-200;(f)PROD 5;(g)CRD 100;(h)海牛2號 。來源:Authors, Williamson and Associates, British Antarctic Survey, Cellula Robotics, Federal Ministry of Education and Research, and Acteon.
海底沈積層取樣機器人, 尤其是海底鉆探取樣機器人(常簡稱為海底鉆機),是高度自動化的裝置,專用於從海底沈積層中精確采集樣本。這些機器人 通常由海面研究船透過鎧裝電纜部署至海底,並依賴遠端操作執行采樣任務。 它們既能在硬巖層中作業,也能在軟沈積物中輕松提取巖芯樣本,工作深度可達百米乃至千米以上。為確保采樣過程的順暢與樣本的完整回收,這些機器人配備了鉆桿、巖芯筒、套管等多種專業工具。
采樣方法大致可分為海面采樣與海底采樣兩大類。 海面采樣 涉及從研究船上延伸出海底沈積層取樣機器人,使其穿越水柱,接觸海底,並依賴船只或采樣器的動力來收集樣本,隨後立即回收至海面。大型鉆井船常進行長期探索,其鉆桿無需立即回收。相比之下, 海底采樣 則是將取樣機器人部署至海底,主要依賴采樣器的智慧化完成采樣後,再進行回收。盡管海面采樣能透過鉆探平台或船只獲得更長的巖芯,但由於需穿越整個水柱進行采樣,操作復雜度較高,且專用船只成本昂貴,導致淺層鉆探與單點采樣效率不高。此外,某些采樣器如抓鬥采樣器,僅能收集海底表層沈積物,且升降過程耗時費力。
▍海底沈積層取樣機器人七大分類
自1970年代英國地質調查局(BGS)開創性地開發並套用了振動取樣器以來,海底沈積層取樣技術便踏上了創新發展的征程。此後,眾多專為探索海洋沈積物與巖石設計的海底沈積層取樣機器人應運而生,它們基於既往廣泛采納的采樣方法,可精煉歸納為七大類別,如圖3所示:
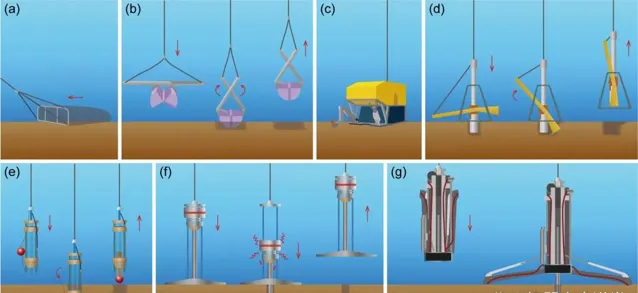
圖3 海底沈積層取樣機器人的類別及其取樣原理:(a)拖網;(b)抓鬥;(c)操作手;(d)箱式取樣器;(e)穿透器;(f)振動取樣器;(g)鉆機。
1.拖網
拖網技術(圖4a)涉及將拖網從船只投放至海底,隨後在目標采樣區域進行拖拽采樣。該技術主要用於回收海洋基石、礫石、粗碎屑及生物樣本。然而,拖網作業面臨挑戰,尤其是在海山區域,拖網易被巖石卡住,增加了操作的復雜性與危險性。
2.抓鬥
抓鬥(圖4b)在距海底5-10公尺處部署,操作人員依據甲板上的海底影像確認目標後,控制抓鬥開合以采集表層樣本。盡管抓鬥在深海資源調查中扮演重要角色,但其輕量設計導致姿態不穩,樣芯易受幹擾,閉合時的劇烈運動進一步降低了采樣成功率。
3.操作手
操作手(圖4c)作為模組化采樣器,常與遙控潛水器(ROV)協同作業。借助ROV的推進、攝像及其他傳感器,操作人員能精確定位采樣目標。操作手透過末端執行器的抓握功能,實作更精確的樣本采集,尤其適用於陡坡或垂直表面。然而,多自由度操作手臂的控制復雜性延長了采樣時間。
4.箱式取樣器
箱式取樣器(圖4d)工作原理類似抓鬥,但更適用於表層軟沈積物采樣,且對樣本的擾動較小,保持了良好的原位效能。箱體沈入沈積物後,透過鏟刀封閉,有效避免了抓鬥操作中的運動幹擾。其多樣形狀設計,如圓柱或矩形,提高了采樣的穩定性與效率。
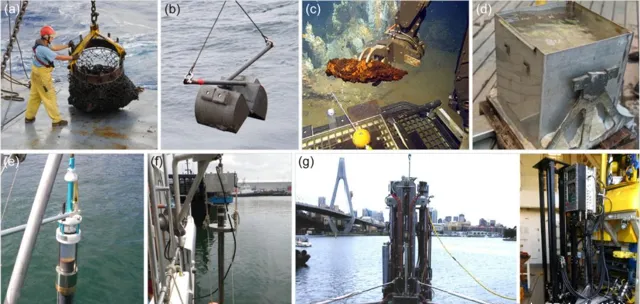
圖4 不同類別海底沈積層取樣機器人的原型:(a)巖石拖網;(b)泥土抓鬥;(c)操作臂 ;(d)箱式取樣器;(e)重力取樣器;(f)振動取樣器;(g)鉆探器:1-PROD 1;2-ROCS鉆探系統 。來源:Authors, Ifremer, Leonard Sussman, Tovel, Ecospan Environmental Ltd, and Williamson and Associates.
5.穿透器
穿透器(圖4e)利用自身重量、靜水壓力與取芯管壓差、移動重物或炸藥穿透海床。為克服隨深度增加的摩擦力,采用活塞設計減少內壁摩擦,確保樣芯的均勻回收。除炸藥外,其他穿透器主要適用於松散土壤的淺層采樣,對堅硬沈積物或巖石則力不從心。
6.振動取樣器
振動取樣器(圖4f)透過高頻振動破壞沈積物粘結,實作連續取芯采樣。其優勢在於鉆速快、樣芯擾動小且環境汙染少,特別適用於砂層及含礫石黏土層的采樣。
7. 鉆探器
鉆探器(圖4g)作為鉆入堅硬地層的利器,是現代海底鉆探取樣機器人的先驅。硬質合金或金剛石鉆頭在進給壓力下輕松破碎巖層,並透過多段鉆管連線,實作更深層次的鉆探與樣芯回收。增強沖擊功能的鉆探器,更是顯著提升了復雜巖層的破碎能力。
▍海底沈積層取樣機器人取樣技術
海底沈積層取樣技術作為海洋科學研究與資源開發的關鍵手段,其重要性不言而喻。盡管存在多種型別的海底沈積層取樣機器人,這些機器人在采樣方法上展現出諸多共性,同時每種方法又獨具特色,伴隨著各自的優缺點。面對研究人員在采樣與探索方面的多元化需求,選擇最合適的采樣方法成為確保采樣任務成功的關鍵,這一選擇直接關聯到樣品的品質、采集效率、成本效益,乃至整個海上作業的成敗。
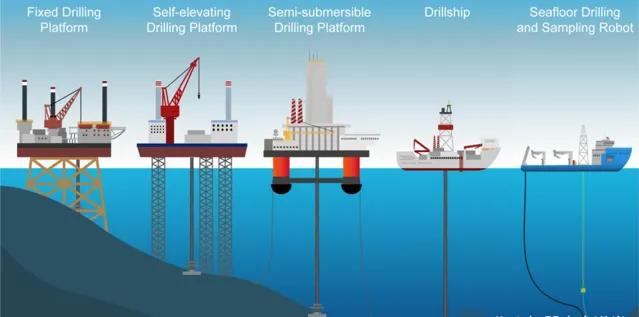
圖5 廣泛使用的鉆探平台和海底鉆探取樣機器人。
在深海鉆探領域,海底鉆探取樣機器人因其卓越的深度鉆探能力而占據重要地位,與海上鉆井平台共同構成了深層鉆探采樣的兩大主力。
海上鉆井平台根據機動性可分為固定式、移動式和浮動式,這些大型結構主要用於海上石油開采,透過不同的錨定方式適應各種水深。相比之下,海底鉆探取樣機器人則展現出更高的靈活性,它能夠從海面支援船部署至海底,直接在海底進行鉆探作業,有效減少了風浪等外界因素的影響,提高了鉆探的精確度和及時性。此類機器人在鉆井平台選址、海底錨固系統鋪設、管道/電纜埋設及環境基線調查等方面具有廣泛套用。
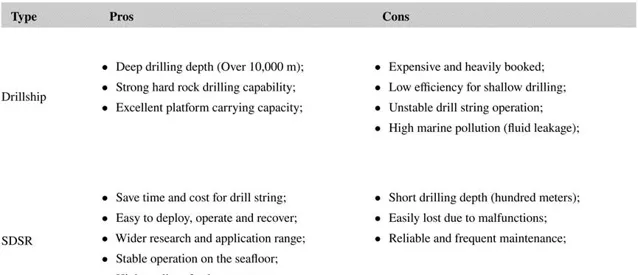
圖6 鉆井船與海底鉆探取樣機器人的優缺點
根據巡航能力和能量來源的不同,海底鉆探取樣機器人進一步細分為固定式和移動式。
固定式機器人依賴臍帶電纜供電和遠端控制,而移動式機器人則通常安裝在ROV(遙控無人潛水器)上,由ROV提供導航、數據傳輸和能量支持。特別是基於ROV的鉆探系統,將固定式機器人的采樣能力與ROV的巡航能力相結合,實作了根據地質條件靈活調整采樣點的多點采樣,為海底礦產資源勘探和巖土工程調查提供了更為經濟和便捷的數據采集手段。
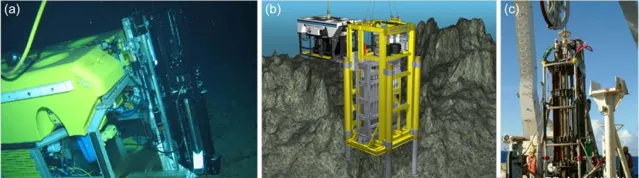
圖7 固定式和可移動式海底鉆探取樣機器人:(a)基於ROV的整合鉆探機器人(ROCS鉆探系統);(b)不完全整合的基於ROV的鉆探機器人(ROV Drill 3);(c)固定式海底鉆探取樣機器人(BMS-1)。來源:Authors.
在取樣方法上,當前的海底鉆探取樣機器人主要采用提鉆取芯和繩索取芯兩種方式。 提鉆取芯需要逐一拆卸鉆桿以提取巖芯樣本,而繩索取芯則透過打撈器直接提升芯管,減少了鉆具處理步驟,提高了鉆探效率和巖芯保護效果。在深海作業中,由於操作時間的長短直接影響任務風險和研究成本,因此繩索取芯技術因其高效、低擾動的特點而得到了更廣泛的套用。

圖8 兩種取芯方法的操作比較:(a)提鉆取芯;(b)繩索取芯。
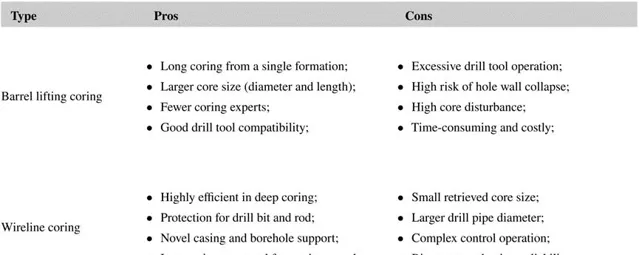
圖9 提鉆取芯與繩索取芯的優缺點
▍海底沈積層取樣機器人關鍵技術
從最初的概念構想到最終的實驗驗證,海底沈積層取樣機器人的研發歷程是一個極為漫長且資源耗費巨大的過程。這一過程中的每一步——涵蓋設計構思、生產制造、控制系統開發、嚴格測試以及保真技術實施——均承載著嚴苛的技術標準,它們是多學科交叉與多種技術深度融合的結晶。要確保機器人在無人深潛的極端環境下,能夠穩定獲取高品質的巖芯樣本。涉及一系列核心關鍵技術,可精煉歸納為四大領域:機構和制造、自動控制、地面驗證及樣本保真。
機構和制造方面, 重點在於機構設計和材料選擇。機構設計需確保采樣過程的可靠性,減少元件復雜性,提高適應力和任務可靠性,如變胞采樣機構的考慮。材料選擇則要求機器人具備高耐壓性、抗腐蝕性、低溫耐受性和電磁隔離性,常用材料如鈦合金及特種塗層技術,同時需考慮成本、重量和可加工性。
自動控制方面, 關鍵技術涵蓋地質分析、遠端操作和自主決策。地質分析透過原位地質分析和聲學傳輸即時獲取地質數據,減少地面研究依賴。遠端操作依賴傳感器進行姿態定位、環境感知和資料通訊,確保操作員準確操控。自主決策使機器人能靈活應對環境變化,減少潛在風險,盡管仍依賴持續通訊下的人為決策。
地面驗證方面, 包括標準大氣環境、靜水環境和淺海環境下的測試。標準大氣環境下的測試全面評估機器人的運動和功能效能。靜水環境測試評估機器人的運動穩定性和電子裝置密封性。淺海環境測試則提供更接近實際深海條件的反饋,評估機器人在動態水流中的穩定性、機動性和適應力。
樣本保真方面, 關註分層維護、壓力-溫度維護及光/氧氣維護。分層維護確保獲取分層的海底巖石並保留地層細節。壓力-溫度維護透過壓力-溫度取樣工具保持樣本原位特性。光/氧氣維護則保持樣本的原位光強和氧濃度,以保留其成分和特性。
▍海底沈積層取樣機器人技術難點
海底沈積層取樣技術作為深海探索的重要手段,在過去的幾十年裏取得了顯著的進步。但與此同時,海底沈積層取樣機器人在開發和采樣過程中面臨諸多挑戰和限制。這些限制主要可以概括為兩大類:陸地技術的局限性,還來自深海環境的惡劣性限制。
在陸地技術限制方面, 首先面臨的是密封與泄漏問題。由於深海環境的特殊性,海底沈積層取樣機器人必須具備出色的防水和防泄漏能力,以保護其內部的機電系統和樣本免受海水的侵蝕。這不僅是為了確保機器人的正常執行,更是為了保持樣本的原位特性,防止因泄漏而導致的汙染。此外,通訊與控制也是一大技術難題。在水下環境中,通訊和控制變得異常復雜,主要依賴臍帶電纜或聲波通訊。然而,這種方式存在距離和幹擾限制,嚴重影響了對機器人的即時監測和控制。最後,能源與能耗問題也是不容忽視的。深海無法利用太陽能等可再生能源,機器人只能依賴臍帶電纜供電。這不僅增加了機器人的體積和能耗,還限制了其采樣效能。
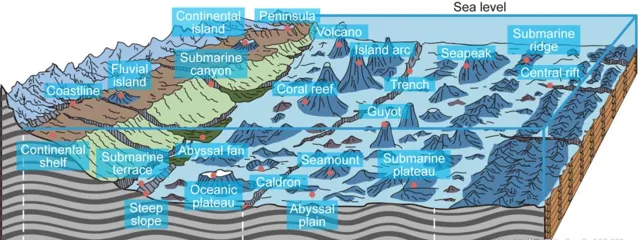
圖10 海底地形概覽
在海洋環境限制方面, 首先面臨的是極端壓力問題。深海壓力巨大,對機器人的強度和抗壓性提出了極高的要求。如果機器人無法承受這些壓力,裝置將很快失效。同時,高壓海水還會加劇電化學腐蝕,對機器人的金屬材料構成嚴重威脅。其次,嚴重腐蝕也是一大挑戰。深海環境復雜多變,富含各種活躍離子,這些離子易與金屬發生反應,導致金屬溶解和加速腐蝕。此外,微生物的附著也會進一步加劇腐蝕過程,對機器人的完整性構成嚴重威脅。最後,嚴苛的地形也是一大限制因素。海底地形復雜多變,不穩定,這對機器人的支撐結構和傳感系統提出了極高的要求。機器人必須具備出色的適應能力和穩定性,才能在不同地形下進行有效采樣。
▍海底沈積層取樣機器人發展趨勢
在發展趨勢方面,海底沈積層取樣機器人正面臨著前所未有的發展機遇,其發展前景廣闊且充滿希望。
短期內,該領域的核心發展策略聚焦於采樣技術的革命性突破與操作效能的顯著提升,力求打造出更為尖端、高效的海洋探索利器。具體而言,近期的奮鬥目標集中在采樣技術的全方位革新上,這包括研發人員攜行式采樣裝置、多樣化采樣器具、靈活的探測方式以及采樣區域的大幅擴充套件。這些創新不僅極大地提高了采樣的精準度和效率,更使得對深邃、遼闊且復雜的海底地形進行探索成為可能,從而極大地擴充套件了人類對海洋的認知範圍。與此同時,透過持續最佳化機器人的操作效能,比如增強作業深度、采用智慧采樣策略、提升環境感知能力以及精細樣本保存等,海底沈積層取樣機器人的實用價值和科學貢獻得到了顯著增強。
而長期來看,發展目標則瞄準了更為宏偉的藍圖,即構建全球性的海洋資源網路、發展深海基礎設施以及助推海底機器人產業的蓬勃發展。隨著人類對深海資源認識的日益深入,全球海洋資源網路的建立將有力推動資源的保護與合理利用,並加強國際間的合作與資訊交流。深海基礎設施的不斷完善將為深海資源的開發和科學研究提供堅實的後盾,而海底機器人產業的崛起則將不斷推動海洋技術的創新與套用,降低傳統人工操作的風險與成本,提升海洋作業的智慧化程度和整體效能。
在技術創新與效能最佳化的雙重引擎驅動下,海底沈積層取樣機器人正步入一個更為寬廣的發展空間和套用領域。展望未來,隨著技術的持續進步和套用的不斷深化,海底沈積層取樣機器人必將在海洋資源勘探、科學研究以及水下監測等關鍵領域發揮更加舉足輕重的作用,為揭開海洋的神秘面紗、保護海洋生態環境以及促進海洋經濟的永續發展貢獻出不可估量的力量。
參考文章
https://onlinelibrary.wiley.com/doi/10.1002/rob.22433











