導讀: 觸覺傳感器是提升機器人對環境和物體認知能力的重要工具。對於機械手來說,整合大面積觸覺傳感器能增強其感知和互動能力,顯著提升其自適應抓取能力。基於顆粒物阻塞的機械手在抓取物體時表現出良好的自適應和變剛度功能,但由於內嵌顆粒物以及包裹顆粒物的薄膜具備高彈性和大變形特性,增加了觸覺傳感器的設計難度。為了解決這一問題,華南理工大學吳賢銘智慧工程學院與其他多所高校合作,在國際一流機器人期刊 【先進智慧系統(Advanced Intelligent Systems)】上發表了一篇論文,介紹了 一種透過可拉伸光電感知皮膚實作顆粒阻塞軟體抓手大面積觸覺感知的技術,並設計了一款具備形狀自適應、變剛度功能的抓手。該抓手能夠感知多點接觸,實作對物體抓握姿態的辨識與滑移檢測。 文末附有論文題目和文章連結。
▍
智慧觸覺感知顆粒物阻塞軟抓手
顆粒阻塞軟抓手 在執行不同形狀、大小、硬度、重量物體的抓取任務中展現出優異的 形狀自適應功能和大負載抓取能力。 然而, 內嵌離散顆粒物和包裹顆粒物的高彈薄膜 使得傳感器的設計和制作增加了難度,同時也增加了顆粒阻塞軟抓手與傳感單元整合的難度。為了解決該問題,研究人員從顆粒阻塞抓手的內部填充物和柔性皮膚兩個方面著手,分別開發了基於視覺感知或磁性皮膚的觸覺傳感器。這些方法雖然可以實作對物體接觸位置、接觸力和形狀的檢測,但也存在局限性。例如,視覺傳感器對內部顆粒物種類和處理演算法要求較高,而磁式觸覺傳感器易受環境磁場的幹擾。
小編今天要介紹的是一種新的解決方案,即 基於高度可拉伸柔性光導波陣列傳感器的新型顆粒阻塞抓手,該抓手具備大面積觸覺感知能力。 該研究由來自 華南理工大學吳賢銘智慧工程學院的李雲泉副教授研究團隊與多所高校的研究者合作完成, 近期發表在國際一流機器人期刊 【先進智慧系統(Advanced Intelligent Systems)】上。
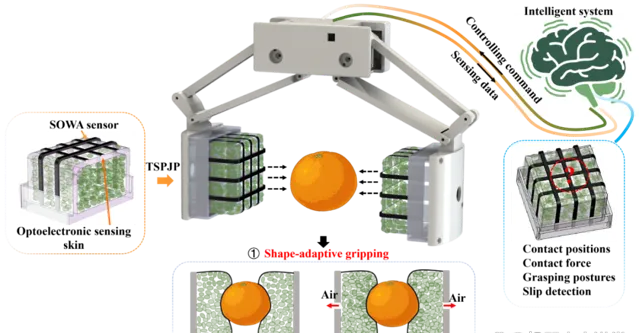
圖1 本論文所提出抓手和傳感器的概念圖
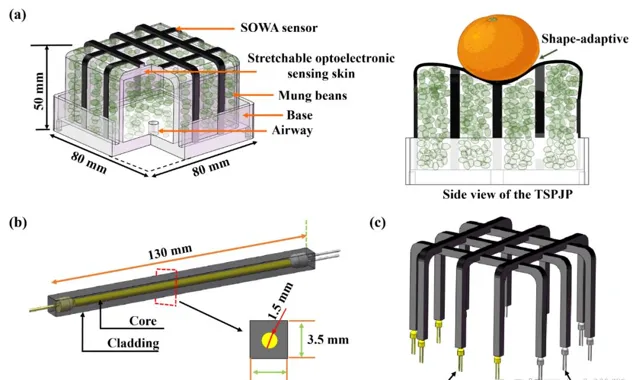
這款軟抓手主要由兩個平行配置的 具有觸覺感知的顆粒阻塞軟體執行器(tactile sensing particle jamming pad, TSPJP) 組成。TSPJP的表面皮膚整合了一個 高度可拉伸的3×3陣列柔性光導波傳感器 ,內部填充了顆粒物。基於簡單的機器學習演算法,該TSPJP可以 檢測49個接觸位置並預測對應的接觸力大小。 這款抓手能夠高效地,自適應抓取從軟到硬、從輕到重的各種物體。在抓取任務過程中, 還能辨識與物體的接觸位置,判斷物體的抓握姿態,並檢測物體的滑移。
圖2 基於顆粒物阻塞抓手的形狀自適應能力的抓取實驗
圖3 顆粒物阻塞抓手的抓取實驗
抓取感知測試: 基於TSPJP的形狀自適應功能,TSPJP可以抓取硬度、形狀、重量不同的物體,並且透過簡單的加權方法可以定性感知物體與TSPJP的接觸位置(如圖4所示)。
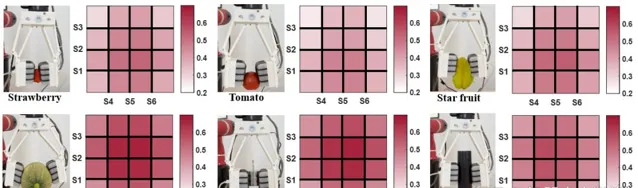
圖4 抓取物體時,將傳感器的六個電壓輸出變化量對映到TSPJP的16個區域
物體的不同抓取姿態辨識: 利用TSPJP的大面積觸覺感知能力,實作對抓手手中抓取物體的姿態辨識,有助於抓手調整抓取姿態,從而實作對物體的穩定抓取。研究人員利用機器學習方法對三個圓柱體(圖5)總共24個抓取姿態進行了辨識,辨識率為98.62%。

圖5 物體的不同抓取姿態辨識
基於滑移檢測的物體穩定性抓取: 研究人員利用小波變換方法實分時析抓取物體的過程中傳感器輸出訊號的頻譜特征變化情況,當其中之一的訊號頻譜特征超過設定的閾值時,控制器接收到此反饋資訊增大抓手的抓取力從而實作對物體的穩定抓取,如圖6和圖7所示。
圖6 基於滑移反饋資訊的物體穩定性抓取
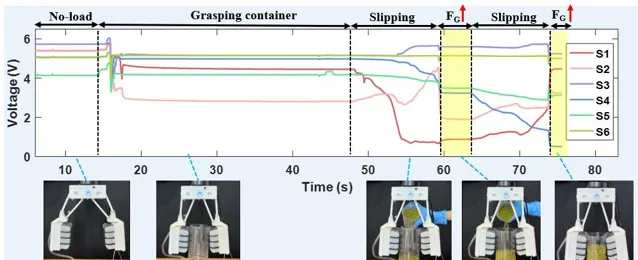
圖7 基於滑移反饋資訊的物體穩定性抓取
▍ 「光電感知皮膚」,實作高靈敏度、大面積觸覺感知
柔性光導波傳感器具有不受電磁幹擾、高靈敏度、快速響應能力、高度可拉伸等優點, 研究人員利用其特性設計了如圖8所示的柔性光導波陣列傳感器,並將其整合到顆粒阻塞執行器的表面柔性皮膚裏。由於柔性光導波陣列傳感器的覆蓋到整個軟體執行器的表面,因此, 顆粒阻塞軟體執行器具有大面積的觸覺感知功能。
如圖8所示為柔性光導波陣列傳感器和TSPJP的制作過程。研究人員采用 一體成型的方法 來制作3×3陣列柔性光導波傳感器,且用 純甘油液體(折射率為1.48)制作光導波的內芯。降低了傳感器的制作難度和成本,並縮短了制作時間。 因為內芯為液體,所以傳感器對壓力響應的靈敏度也會有所提高。
圖8 TSPJP的設計。(a)TSPJP的三維結構圖(左)和形狀自適應功能展示(右),(b)單根柔性光導波傳感器,(c)3×3陣列的柔性光導波傳感器。
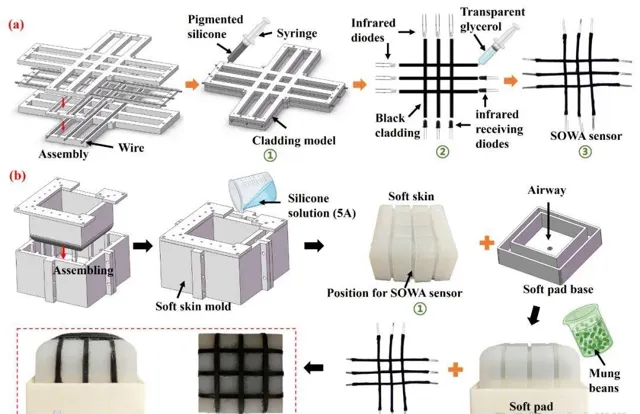
圖9 (a)柔性光導波陣列傳感器的制作,(b)TSPJP的制作過程。
▍ 柔性光導波傳感器的效能測試
研究人員 測試了單根柔性光導波傳感器的壓力響應、彎曲響應和重復性, 如圖10所示為實驗結果。實驗結果表明由硬度為10A矽膠制作的柔性光導波傳感器的壓力響應具有 較高的靈敏度(最高的靈敏度可達10.36% dB kPa-1) 和 較寬的檢測範圍(> 350 kPa)。 此外,該柔性光導波傳感器表現出 對彎曲不敏感的特性 。這是由於光導波外殼內壁比較光滑,傳感器彎曲時產生的光散色很少。這有利於傳感器與軟體執行器整合後依然能夠保留大部份光能量。
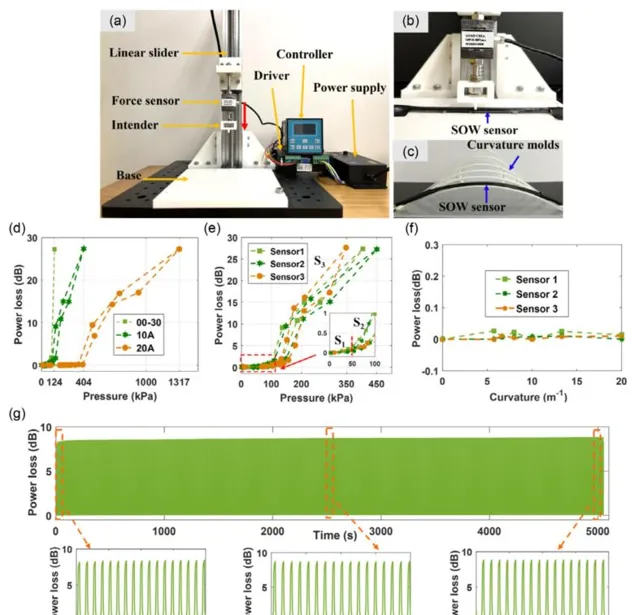
圖10 3×3陣列柔性光導波傳感器的效能測試。(a)測試裝置,(b)傳感器的壓力響應測試方法,(c)傳感器的彎曲測試裝置,(d)不同外殼硬度的傳感器的壓力響應曲線,(e)外殼硬度為10A的傳感器的壓力響應曲線,(f)外殼硬度為10A的傳感器的彎曲響應曲線,(g)傳感器的重復性測試結果。
▍ TSPJP的效能測試
研究人員從TSPJP的 形狀自適應能力和感知能力 兩個方面進行了探索。TSPJP表面整合的3×3陣列傳感器 總共有6個輸出訊號 (圖11(a))。根據光導波陣列傳感器在TSPJP表面分布的特點,將 TSPJP劃分為49個位置 (圖11(b)),包括 16個區域(A1~A16),傳感器的24小節(S1~S24),傳感器的九個交叉點(P1~P9)。

圖11 (a)柔性光導波傳感器的六個輸出訊號分布圖,(b)TSPJP的區域劃分。
TSPJP的形狀自適應能力測試: TSPJP的表面感知皮膚很軟,因此,物體與TSPJP接觸會使TSPJP表面凹陷而產生一定形變,內部顆粒物之間的間距進一步減小。在負壓條件下,撤去物體,TSPJP表面仍會保留與物體接觸時的變形。這證明了TSPJP具有對不同物體的形狀自適應功能(圖12)。
圖12 TSPJP的形狀自適應能力測試
TSPJP的感知能力測試: 與一般的整合多個獨立傳感器單元的陣列傳感器不同,雖然TSPJP的表面沒有覆蓋高密度的傳感單元,但當其表面某個位置受到外力時,TSPJP內部顆粒物的分布發生改變,從而對柔性光導波陣列傳感器的不同位置產生不同大小的擠壓力,傳感器的輸出也會發生變化且離受力點越近的傳感器訊號產生的變化越大。因此,可以透過傳感器的輸出訊號大小來檢測接觸位置和對應的接觸力。 當TSPJP表面的九個交叉點在受到外力時,可用直接透過六個輸出電壓值的大小來分析出受力的點。此外,TSPJP可以憑借其大面積觸覺感知能力來實作類人手一樣預估物體重量的功能。 (如圖13和14)
圖13 TSPJP的9個交叉點對外力的感知
圖14 TSPJP感知不同重量的物體
基於機器學習方法,實作TSPJP準確檢測多個接觸位置和接觸力的功能。 如圖15所示,研究人員利用機器學習方法來檢測TSPJP表面劃分的49個接觸位置, 辨識率高達99.80% 。並用 LSTM網路對接觸力進行預測,RMSE誤差為0.3869N。
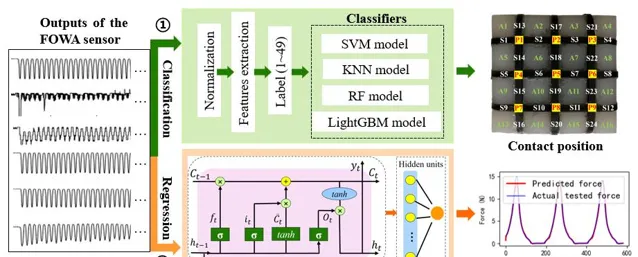
圖15 基於機器學習方法的接觸位置辨識和接觸力預測
▍ 總結與展望
以上研究表明利用柔性光導波陣列傳感器來實作顆粒阻塞軟體抓手大面積觸覺感知能力的方法同時兼具低成本、易制作和較高的感知效能,為豐富抓手的感知能力提供了一種新的解決方法。在未來的工作,研究人員將進一步最佳化演算法從而實作抓手在作業任務中的自主性和智慧化。
文章題目與連結:
Mo, L., Xie, W., Qu, J., Xia, J., Li, Y., Zhang, Y., Ren, T., Yang, Y., Yi, J., Wu, C., & Chen. Y. (2024). Empowering Particle Jamming Soft Gripper with Tactility via Stretchable Optoelectronic Sensing Skin. Advanced Intelligent Systems.
http://doi.org/10.1002/aisy.202400285
論文相關的附件視訊可以在論文網頁檢視











