前言
機器發展到今天已經走了很長一段路,從機械化時代取代人力,到自動化時代取代人類操作,現在進入了一個叫做自主化的新時代。
趨勢是透過使用嵌入式電腦、智慧傳感器和智慧控制等先進技術使機器自主化,以便最終機器能夠在沒有人為幹預的情況下自行執行。
模組化可重構機器代表了這些智慧機器的最高水平,因為它們能夠改變其結構以迅速適應新環境,執行新任務,甚至從損壞中恢復。

除了這些功能優勢外,模組化可重構機器在經濟上比傳統機器更具優勢,基於可批次生產的模組構建,整體成本更低,此外,由於消除了對全新機器的再投資的需要,因此經常性成本和交貨時間最小化。
盡管世界各地已經開發了許多模組化可重構機器,但它們仍然主要基於傳統機器的方法,並根據具體情況對模組化可重構機器進行了一些修改,因此必須發展一種新的理論來處理不同拓撲性質。
模組化可重構機器的發展經歷了什麽?又是怎樣進行修改升級的呢?

模組化可重構的研究
對模組化可重構機器的研究是一個新興領域,研究活動發生在兩個領域:機器人和制造,在機器人領域,已經提出了許多有趣的模組化可重構機器人,雖然這些可重構機器人是臨時提出的,但它們大致可分為三類:自組裝、自配置和手動配置。
自組裝機器人具有最高水平的可重構性,因為它們可以從自己的模組自動組裝和拆卸,甚至可以自行生長,自配置機器人雖然不是自組裝,但可以在機器人系統透過某種形式的手動輔助組裝後執行自重新配置。

手動配置機器人是可重構機器人的最低階別,只能透過手動輔助重新配置,然而,在工業套用方面,由於其結構簡單,最後一種型別是最經濟和堅固的。
在制造領域,主要精力用於開發可重構機床,使用螺桿理論進行運動學分析和用於機器結構合成的圖論,進一步開發了可重構機床和相關控制系統的系統設計方法。

引入一種新的螺釘表示用於可重構機床的運動學建模,在工作中透過將所需的加工操作分解為一組任務矩陣來完成模組選擇,然後將其對映到機床模組,但是沒有明確的指南可用於確定任務矩陣。
隨著加工運算元量的增加,確定一組最小但足夠的任務矩陣變得相當困難,機床的模組化設計已經研究了幾十年。

一些研究人員將機床結構分解為簡單的幾何形式,例如板、梁和盒子,他們的研究為柔性制造系統的機床設計做出了貢獻。
後來又有人改編了模組化機床合成方法,並開發了一種列舉機床模組的方法。

采用模組化結構的兩個主要好處是元件的標準化和裝置的可重構性,特別是模組化設計的優點。
這些優點可以簡單概括為裝置可重構性、迅速引進新裝置的可維護性、設計資訊重用。
盡管傳統的機床設計記錄在中,模組化設計記錄在中,但這些方法並未在可重新配置機床的背景下進行。

解決辦法
模組化可重構機床系統設計方法包括三個步驟:模組辨識、模組確定和布局合成。
第一步,從一系列通用機器中收集模組元件以建立模組庫。在第二步中,對於要加工的給定零件系列,從模組庫中選擇一組所需的模組,以構建所需的可重新配置機床。
在第三步中,透過考慮許多效能指標進行評估來決定最終的機器布局,基於這種方法,已經開發了一個軟體包,可以為給定的零件系列設計模組化可重構機床。

模組化可重構機床 基於構建塊進行設計,在此設計問題中輸入是一組要加工的零件,稱為零件組,每個零件共享一些加工特征,但在其他特征上有所不同。
輸出是可重新配置機床的最終設計,該機床可以透過重新配置使用最少的模組集來加工零件系列中的所有加工特征。

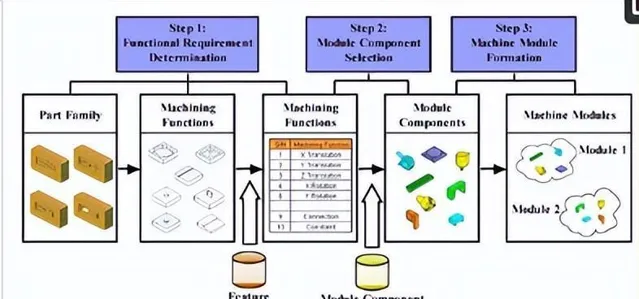
當將給定的零件系列輸入設計系統時,將根據刀具運動要求提取一組加工特征並將其與機床模組相關,這是第一步,稱為模組辨識。
然後將選擇並評估一組機器模組,以形成一組最小的模組,這是第二步,稱為模組選擇,最後,將根據許多效能指標確定最終設計,這是第三步,稱為布局合成。

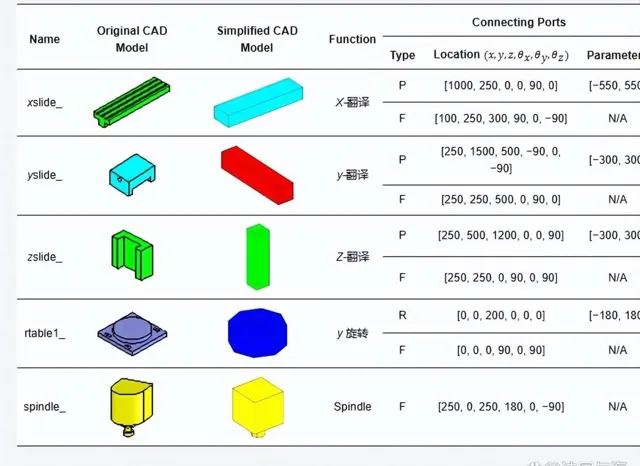
根據兩個核心功能為每台機器建立功能分類:運動和支撐,運動模組包括旋轉和線性運動系統;支撐模組包括機床床身和立柱。
這些模組在第二個模組中示出,它們的設計內容在第三個模組中示出,運動要求在最後一個模組中示出,基於中總結的機床控制系統,可以為執行器和控制器建立類似的分類結構。
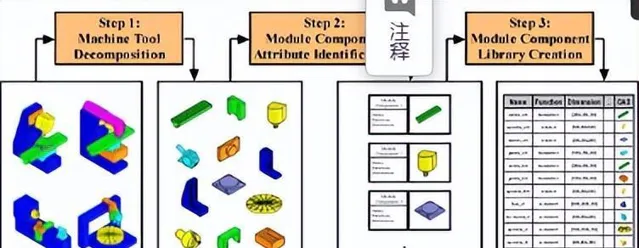
該庫用作加工特征庫,加工特征標識必須移除的材料體積,以便從初始庫存中獲得最終零件幾何形狀,以及驅動刀具進行加工所需的運動,通常稱為刀具接近方向。
可重構機床設計的基本思想是保留所有通用模組作為基礎,同時嘗試減少不同任務所需的單個或類似模組的數量,有人可能會爭辯說,透過簡單地組合所有六個模組。
最終的機床將能夠在不重新配置的情況下加工所有特征,然而這是多功能機床的傳統設計方法。
代價是加工零件系列中的每個零件時可能不需要額外的機床軸,可重新配置機床設計的本質是找到可以加工零件系列所有特征的最小數量的機床軸。

如果透過將單個模組重新配置,模組總數將減少到五個,但是其他兩個單一模組不能簡單地透過重新配置來替換。
普通模組作為基礎,類似模組用於重配置設計,單數模組由於用途單一,一般無法設計重配置。

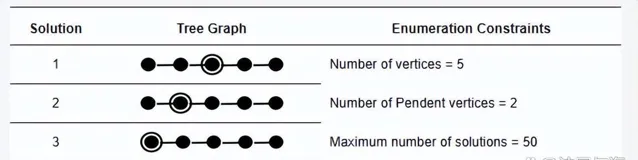
選擇模組後,將生成布局以形成所需的可重新配置機床,采用樹形圖列舉演算法,第一步是透過定義列舉約束。
執行列舉和檢查同構來列舉所有通用布局,廣義布局生成的列舉約束為頂點數、吊墜頂點數、最大數量的解決方案,頂點數設定為等於所選模組元件數,吊墜頂點的數量根據加工要求設定。

所采用的布局列舉演算法是一種用於生成根樹型別布局的不斷增長的演算法,該演算法透過分配頂點數、變量的初始值和約束常量來初始化。
此時樹形圖中只有一個頂點,然後將新頂點載入到樹圖中,並透過將新頂點與現有頂點連線來生成解決方案。
可以透過將第二個頂點與根頂點連線來建立一個解決方案,載入折點將繼續,直到生成所有可能的解決方案或解決方案的數量超過最大值。
生成新布局時,該布局可能與現有布局之一同構,因此在溶液生成期間執行同構檢測,該方法需要首先檢查樹是否紮根。
如果樹沒有紮根,則確定樹的中心並被視為有根,找到樹中心的一種方法是重復刪除環通度為 1 的所有頂點,直到留下單個頂點或兩個由邊連線的頂點。

如果頂點是唯一剩下的頂點,則頂點是樹的中心,如果剩下兩個頂點,將有兩個單獨的中心。
樹紮根後,將套用同構檢測演算法,廣度優先搜尋或深度優先搜尋方法都可以用於此目的。
建立通用布局下一步是透過將通用布局中的頂點替換為模組元件,將通用布局轉換為專用布局。
為了便於說明對模組元件進行,此模組元件上有兩個連線埠,其中一個是棱柱形埠,另一個是固定埠。
在這項工作中考慮三種不同型別的連線埠:棱柱形埠、回旋埠和固定埠,棱柱形埠是指其座標系能夠沿其自身的移動特定範圍內的距離的連線埠。
對於給定的零件系列,透過提取其加工特征,可以正確選擇相應的模組集,從中可以對許多機床配置進行分組,透過重新配置組合單個或相似的模組,可以確定最少的模組集。
然後可以執行布局綜合過程以生成基於樹形圖演算法的通用布局,並透過檢查所選模組來減少它們以建立特定的布局。
結合模組化機床設計的三個重要問題,即可重構性、剛度和誤差敏感性,透過布局評估過程找到基於組合指標的最終設計。












