以下內容來自 小六的機器人SLAM學習圈 知識星球 每日更新內容
Submitted to ICRA 2024|透過與視覺慣性裏程計的緊密融合,實作了單軌地面車輛動力學模型的線上標定
【Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry】
文章連結: [2309.11148] Online Calibration of a Single-Track ...
作者單位:馬克斯·普朗克智慧系統研究所圖賓根(德國)
demol連結: https://youtu.be/BuGY1L1FRa4
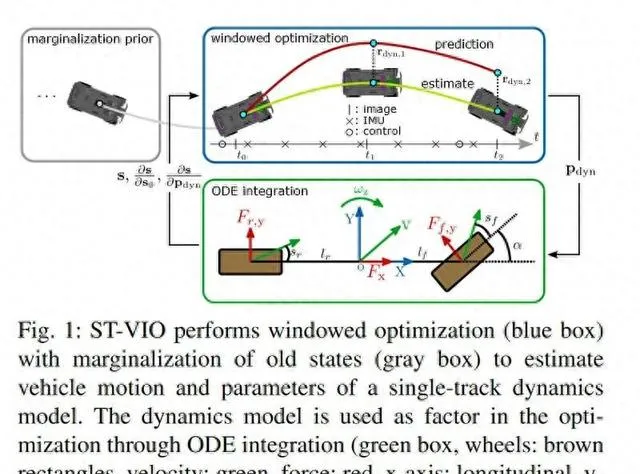
輪式移動機器人需要估計其運動和控制軔作對導航規劃的影響。在本文中,我們提出了一種新的方法ST - VIO,它將輪式地面車輛的單軌動力學模型與視覺慣性裏程計緊密融合。我們的方法線上校準和調整動力學模型,並在未來控制輸入的條件下促進準確的前向預測。單軌動力學模型使用常微分方程式來近似平地上特定控制輸入下的輪式車輛運動。
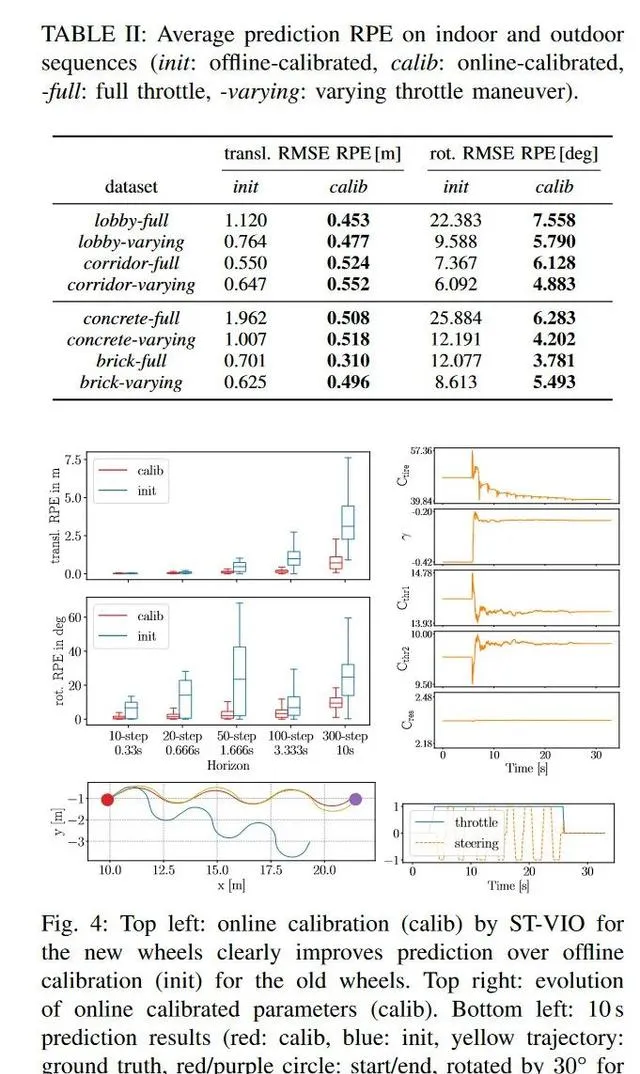
我們使用單軌模型的無奇異和可微變體,使其能夠作為動力學因子無縫整合到VIO中,並與VIO狀態變量一起線上最佳化模型參數。我們在具有不同地形型別和車輪的室內和室外環境中使用真實數據對我們的方法進行了驗證。實驗結果表明,ST- VIO不僅能夠適應環境的變化,在新的控制輸入下實作準確的預測,而且提高了跟蹤精度。

以上內容來自小六的機器人SLAM學習圈 知識星球 每日更新內容
推薦閱讀
如何快速上手基於NeRF的SLAM?
太強了!世界第一款開源的自動駕駛一體化框架Autoware!(附交流群)
【全網第一個】3D Gaussian Splatting原理、套用場景及最新進展
【全網第一個】詳解深度學習特征提取匹配開源演算法SuperPoint和SuperGlue











