用於建築施工現場管理的超寬頻定位系統
目錄
- 簡介
- 超寬頻地理定位系統
- 建築工地中的 UWB 位置跟蹤
- 主動危險檢測
- 即時工作進度跟蹤
- 總體設計指南
- 結論
【註:前2章介紹UWB超寬頻,側重技術;如您更關註它在建築業內的套用,可以直接跳至第3或第4章(不過本文全文稍偏技術性 )】

【續前文】
5. 即時工作進度跟蹤
建築施工是一個資訊密集的過程,很容易造成管理組織的資訊過載。 資訊檢索中浪費的時間、不良且復雜的資訊結構以及延遲的溝通,可能會阻礙有效的管理。 用於改進資訊管理和計畫績效自動控制的嵌入式 ICT 系統目前是建設計畫管理的最前沿。 透過即時收集低階現場數據(例如工人、材料和設施的位置),並將其輸入到模式和過程辨識演算法中,這些系統有望支持進度控制和偏差分析,提高人類管理大型復雜工作流程數據集的能力。
過去的實驗表明,如果準確度誤差低於 20%,則可以使用對工人的跟蹤以及與計畫基線的比較,可用來評估正在進行的活動和相關的初步原型。 將這一概念擴充套件到自動化活動進度監控,在土方控制、供應管理、道路建設領域都成功結果的報告。 卡博納裏(Carbonari)等人認為,UWB 位置跟蹤數據可以有效地套用於自動化工作采樣。 事實上,位置跟蹤數據可用於分解不同工作區域中工人和裝置隨時間的存在情況,以及與工人和材料的軌跡相關的情況,原則上可用於論證工作進度。
然後需要強大的客製設計模式辨識演算法來從原始跟蹤數據中提取活動型別和強度,同樣,這仍然是一個開放的研究領域。 為了演示如何將 UWB 套用於工程進度估算,請考慮以下範例,摘錄自卡博納裏(Carbonari)在鋼筋混凝土框架公寓樓施工期間所領導的建築工程跟蹤活動。 圖11是施工現場的一些照片,圖12是大樓一層的詳細布局。 現場澆築混凝土板安裝是所示的監測活動。

圖 11:UWB 工作流程跟蹤實驗圖片:施工現場設定 (a)、腳手架中的接收器安裝 (b) 和澆築階段 (c)
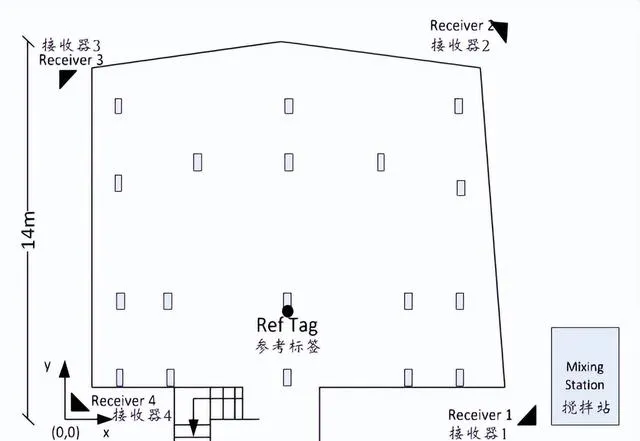
圖 12:UWB 工作流程跟蹤實驗的現場實驗照片和工廠布局
三分之一的機組成員致力於這項任務; 兩名在現場澆築混凝土板工作,一名控制起重機軌跡。 起重機將起重機鏟鬥從大約放置在參考位置 (15,0) 的混凝土攪拌站移動到當前混凝土澆註位置,由兩名工人中的一名負責操作,而另一名工人則水平並振動液態混凝土澆築。 圖13顯示了起重機鏟鬥X和Y座標時間進度。 可以清楚地看出,x=15 峰值對應於 y=0 谷值,並且該模式最初在 x=0 座標附近出現約七次,並且 y 座標呈增加趨勢。 這很容易想象為代表第一條混凝土澆註帶,對應於實際發生的地板的最左側。 然後工作按照類似的趨勢進行,直到起重機鏟鬥停在施工現場的攪拌站區域。
圖 14 顯示了工人在板上的位置。 即使在這種情況下,也可以清楚地看到當起重機鏟鬥位於澆築板時,工人的位置如何準確地跟隨起重機鏟鬥的位置。 事實上,工人的職責是在本地引導鏟鬥,以便在澆註階段使混凝土盡可能均勻地分布。 這是由 UWB 跟蹤系統正確且準確表示的活動約束。 最後,透過辨識 x=15m 處的起重機位置峰值,可以輕松計算傾倒的鏟鬥數量,從而實作非常準確的工作進度記錄。
總而言之,對簡單施工任務的UWB跟蹤所擬議的快照表明,可以透過工人、材料和裝置的軌跡清楚地辨識活動模式。從唯一標簽識別元中獲得的身份資訊,以及可以直接與工作流基線繪制的關系,為在建築設施中實施先進的工作進度跟蹤系統提供了非常好的和可靠的基礎。
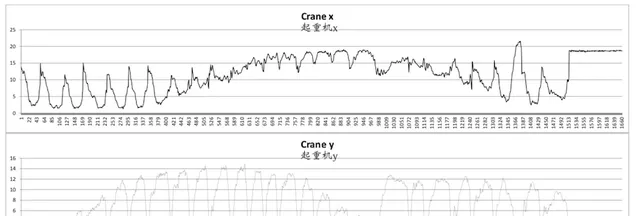
圖13:起重機鏟鬥X、Y座標的時間進度。

圖 14:澆築工人 X 和 Y 座標的時間進度
【未完待續】

農歷癸卯臘月廿七
2024.2.6
【部份圖片來源網路,侵刪】











