本 文內容轉載自 微信公眾 號:武漢大學學報資訊科學版,版權歸原作者及刊載媒體所有,所刊載內容僅供交流參考使用,不代表本刊立場。
參照格式:
龔健雅,張策,石書祝.GNSS外放射線源動目標遙感檢測技術現狀與發展趨勢[J].武漢大學學報(資訊科學版),2024(GONG Jianya,ZHANG Ce,SHI Shuzhu.A Review of Moving Target Detection Techniques Using GNSS Passive Remote Sensing System[J].Geomatics and Information Science of Wuhan University,2024)
DOI: 10.13203/j.whugis20240050
摘要: 全球導航衛星系統(global navigation satellite system,GNSS)除了用於導航定位服務之外,因其訊號覆蓋率高及衛星可見性強等優勢,亦可作為被動雷達的機會放射線源完成地表環境和運動目標的遙感探測。但是,其較低的到達地面功率和較窄的訊號頻寬也給該類系統的套用帶來諸多挑戰。回顧了GNSS被動雷達遙感系統近30年的發展歷程,聚焦運動目標遙感檢測技術。透過分析後向散射和前向散射兩種GNSS外放射線源探測體制下的動目標檢測流程,梳理了相關技術的重點和難點,介紹了國內外在相關問題上取得的研究進展和潛在發展趨勢,以期為相關研究提供參考。
論文內容
1. 基本原理
GNSS訊號往往由數據碼、測距碼和高頻載波3部份組成,其訊號形式可以概括表示為:

式中,t為時間變量;A為訊號的幅值;D和C分別為訊號的數據碼和測距碼;f 0 代表載波頻率;φ 0 代表訊號的初始相位。
系統中的直射訊號成分可以表示為:

式中,Ad表示直射訊號的幅值;τd表示直射訊號的時延;φd表示直射訊號的初始相位。與之類似地,用下標r來標識反射訊號的幅值、時延以及初始相位,反射訊號可以寫為:

用τdelta和Rdelta來分別表示直射訊號和反射訊號之間的時延差和傳播路徑長度差,進而有:

式中,R st 表示衛星與目標的距離;R tr 表示目標與接收機的距離;R sr 表示衛星到接收機的距離;c表示光速常量。
1)後向散射探測體制下動目標遙感檢測方法
後向散射探測體制下的典型套用是監測運動模式較簡單且雷達截面積(radar cross p,RCS)較大的水面運動目標。相應的雙站雷達遙感系統的幾何結構如圖1所示,其中本地座標系統的原點設定為接收機位置,並用α表示雙基地角。
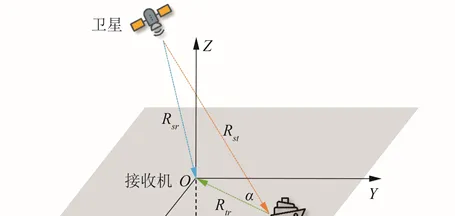
圖1 後向散射探測體制下的GNSS被動雷達遙感系統檢測水面動目標的幾何結構圖
當回波訊雜比足夠高時,對反射訊號進行距離壓縮,其結果足以讓系統完成目標的探測及徑向距離的估計。為了進一步提高訊雜比以及準確估計目標的運動參數,在典型的訊號處理流程中,脈沖化的回波會被排列成二維矩陣並在方位向進行時頻轉換。假設目標相對接收機做理想的勻速直線運動,二維訊號矩陣在經過方位向的離散傅立葉變換處理之後會被轉換到距離向時域方位向頻域,也就是距離都卜勒(range-Doppler,RD)域。此時的訊號形式可以被表示為:

式中,τ為距離向時間變量;fa表示方位向頻率變量;fd0是和徑向速度對應的都卜勒頻移;NRD則為雜訊成分;φRD表示當前訊號的初始相位,也可以解釋為RD域訊號中幅值峰值點的復數相位。這就是典型的後向散射探測體制下的動目標檢測流程的處理結果,來自目標的回波能量已經被聚焦到和初始徑向距離以及速度相關的RD單元內。
2)前向散射探測體制下動目標遙感檢測方法
對於前向散射探測體制下的動目標檢測問題,因為目標穿越雙基基線的時間視窗非常短暫,且回波受到目標劇烈震蕩的RCS調變,所以系統往往無法將訊號排列成二維形式進而使用傳統的RD處理進行目標檢測。但得益於在前向散射區內回波訊號的幅值會產生顯著變化的特點,目標往往在時域即可被有效檢測。典型的前向散射探測體制下的雙站雷達遙感系統的幾何結構圖如圖2所示。
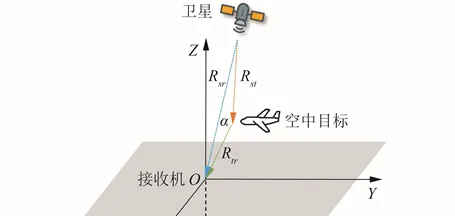
圖2 前向散射探測體制下的GNSS被動雷達遙感系統探測空中動目標的幾何結構圖
在前向散射體制下,因為直達波和目標回波具備相似的極化方向和入射角度,所以接收機往往配置一副右旋圓極化天線進行單鍊結采集。接收訊號中包含直射訊號、散射訊號以及雜訊等成分。
在前向散射區內直射場與繞射場之間的關系與該時刻具體的雙基構型、訊號形式、目標尺寸以及目標距離均密切相關,難以一概而論並給出具體的量化表達。對於特定的前向散射雷達(forward scattering radar,FSR)系統可以定性地分析當目標穿越前向散射區時接收訊號的幅值變化規律:若目標位於遠場位置,依據適用於夫瑯禾費繞射的巴比涅原理可以證得此時目標的RCS只與其形狀有關,繞射訊號能量被大幅增強。而與此同時,遮蔽效應因為訊號以球面波形式傳播而相對較弱,直射訊號的能量被較大程度上保留,總場訊號的幅值會呈現上升趨勢;若目標位於近場位置,則遮蔽效應占據主導,巴比涅原理也不再適用於菲涅爾繞射,繞射場的強度會小於遠場。若目標足夠接近接收機且其陰影面積較大,其甚至會將系統的第一菲涅爾區完全遮蔽(該區域包含了直射訊號近90%的能量),進而使得直射場強度被大幅削弱,總場訊號的幅值呈現下降趨勢。
基於前向和後向散射探測體制的被動雷達遙感技術,本質上均依賴於對散射訊號的延時、都卜勒頻移及相位等參數的估計和分析。但在實際套用中兩者的訊號處理方式和適用的探測目標型別上則大有不同,這導致二者在檢測流程中的一些近似條件並不通用。
2. 關鍵技術及研究現狀
1)後向散射探測體制下動目標遙感檢測關鍵技術及研究現狀
①幀內回波能量聚焦技術
對於回波能量不足的弱目標探測問題,目前主流的做法是在保證幀內訊號相幹性的前提下,延長CPI進而獲得更充分的能量積累。然而對於特定的點目標,當其在幀內發生跨越距離單元和頻率單元的走動時,幀內的訊號相幹性會被破壞,來自目標的回波能量無法聚焦在一個RD單元內,進而導致能量的散焦。幀內能量聚焦的關鍵技術可以分為距離徙動(range cell migration,RCM)校正和都卜勒徙動(Doppler shift cell migration,DCM)校正兩類。一幀典型的經過RCM和DCM校正的水面動目標實測檢測結果如圖3所示。其中目標在RD域中的位置以紅框標識,且其都卜勒頻移已被換算成徑向速度 。
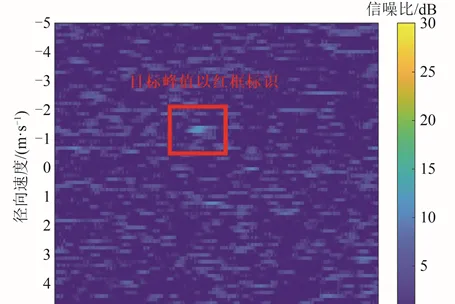
圖3 後向散射探測體制下的GNSS被動雷達遙感系統檢測水面動目標結果
最符合直覺的RCM校正方法是直接將有關的相位項按照徑向速度的數值用共軛項進行補償,但目標的速度資訊通常是未知的。表1整理了幾種主流的RCM校正方法的特點。
表1 主流RCM補償方法比較
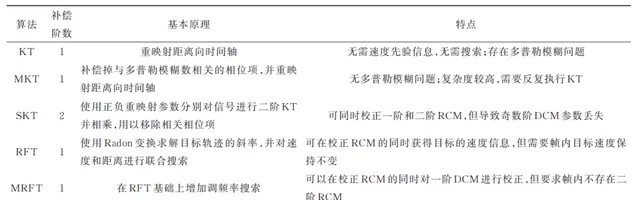
DCM的數值與目標及衛星的加速度有關。衛星的運動參數是已知的,但目標的運動參數則是有待估計的,所以DCM校正本質上需要對慢時間頻域訊號能量分布進行檢測。考察頻譜能量分布最簡單的辦法是利用DFT直接進行時頻轉換,表2整理了幾種主流的都卜勒頻移時分頻析方法的特點。
表2 主流都卜勒頻移時分頻析方法比較
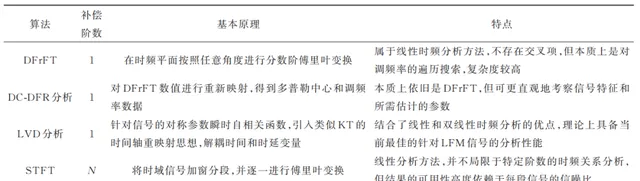
綜合來講,除了KT以及LVD分析,目前較為主流的RCM和DCM補償方法均基於搜尋的思想,而搜尋結果的判斷則有賴於接收訊號的訊雜比。倘若原始回波訊雜比較低以致在RD域內難以檢測到目標峰值,這些分析方法便很難奏效。從另一方面考察,搜尋的過程需要對目標運動進行多項式估計,以便對特定參數進行有針對性的解算。當目標的機動性較高時,低階多項式對目標的運動表達將不再充分,而高階多項式對應的搜尋過程則具有呈指數級上升的時間開銷,這並不符合雷達系統的效能要求。進一步地,若系統能接受的多項式階數有上限,則其CPI的選擇亦是受限的。最大CPI的數值和多項式階數息息相關,理想情況下任何運動過程都可以用多項式來擬合,但其階數可能遠超系統限制,所以幀內回波能量聚焦的效果對於高機動性、小RCS的目標往往並不理想。
②幀間回波能量聚焦技術
目前,針對GNSS被動雷達遙感系統幀間的回波能量積累技術,或者多幀檢測(multi-frame detection,MFD)技術的相關研究較少。其根本原因在於當單幀數據無法成功檢測目標時,幀間的RCM和DCM會處於無法預估的狀況。此外,幀間的訊號相位走動受雜訊、雜波以及目標閃爍等因素影響,亦是完全隨機的。
普遍意義上,後向散射體制下的MFD思路主要分為兩種,首先是透過同一顆衛星的不同時刻的數據幀的積分對目標的回波能量進行聚焦。
第二種MFD思想是將多基地雷達的回波訊號進行融合並對目標進行聯合檢測,這其中又可以分為多星單接收機(multiple input single output,MISO)系統、單星多接收機(single input multiple output,SIMO)系統以及多星多接收機(multiple input multiple output,MIMO)系統3種,MISO系統目前較為主流。對於分布式系統的聯合檢測問題,其關鍵難點在於如何將多個信源的數據有效配準。
在極低訊雜比的前提下,若在每一幀回波中系統都無法單獨解算目標資訊,則目前還未有較好的方法可以實作多信源能量的聚焦。其原因便是目標位置和參數的不確定性導致無法配準的多路訊號難以進行有效的能量積累。這種幀間資訊差的不可預估也導致了在幀間的能量積累方式上,目前廣泛采用的是可以不顧及相位差異影響的非相幹積分。不過目前已經有部份研究開始探索幀間的相幹積分方式。
③動目標定位及成像技術
當動目標的探測和參數估計完成時,系統可進一步對目標進行定位、跟蹤以及逆SAR(inverse SAR,ISAR)成像等後續處理。其中水面動目標的定位和跟蹤技術已經較為成熟,因高度資訊相對穩定,所以可以較為方便地在一個二維平面上解算其空間位置。本地座標系4維搜尋演算法事實上可以實作目標在水面平面上的定位,但具備不同初始位置和速度向量的目標完全可能擁有相同的RD歷程,所以演算法應該針對此問題進行進一步最佳化。若系統的訊號源不局限於單顆衛星,則可利用MISO系統的多星檢測結果來實作交叉定位,進而避免上述的定位模糊問題。
在動目標成像技術方面,有文獻使用單站GNSS反射訊號對水面動目標實作了ISAR成像,影像中可清晰觀察目標在方位向的能量展寬。倘若目標沿著垂直於接收機的視線方向做直線運動,也可以利用傳統的SAR成像技術對回波能量進行對映。
2)前向散射探測體制下動目標遙感檢測關鍵技術及研究現狀
①前向散射回波訊號提純技術
使用GNSS訊號的FSR系統通常只設定一個接收通道,並無參考通道和回波通道的區分,所以接收通道內混雜著直達波、目標回波以及雜訊等成分。為了獲得盡可能純凈的散射訊號,需要對接收通道內的非回波成分進行濾除,這是目前相關套用的難點之一 。 目前常用的回波提純手段是在跟蹤環路輸出的結果中,使用陷波濾波器直接濾除和直達波對應的直流成分。對於殘留的雜訊成分,通常用低通濾波器來對相關的高頻成分進行抑制。
②動目標檢測器
關於使用前向散射訊號進行目標檢測的工作較為少見,但倘若不限制放射線源為GNSS訊號,相關研究成果則相對豐富。
如使用Wi-Fi訊號的FSR系統檢測車輛目標,利用廣播訊號對在前向散射區內的空中目標進行有效檢測。上述兩種訊號的到達功率相對於GNSS訊號來說有顯著優勢,所以相關的時分頻析也較為簡便。但在GNSS FSR系統中動目標的探測通常借助回波訊號的幅值變化來實作,這類檢測手段通常針對被遮蔽效應調變的訊號而設計,所以適用範圍受到目標尺寸和目標飛行高度的限制。事實上除了對多種飛行器的穿越前向散射區時訊號幅值變化規律的測試以外,目前還較少有利用增強效應實作目標檢測的成果。典型的受遮蔽效應調變的空中目標回波幅值變化如圖4(a)所示,受前向散射RCS增強效應調變的結果如圖4(b)所示。
圖4 前向散射體制下的GNSS被動雷達遙感系統檢測空中目標結果
當前學界的相關研究主要集中在較近距離的大RCS目標的檢測任務上,且缺乏具備量化標準的檢測器。對於遠距離的小RCS目標,還需要更多基礎研究來明確其回波訊號的調變方式,進而設計相應的檢測方案和參數估計演算法。
③動目標參數估計及輪廓成像
當目標被系統成功檢測後,則可以進一步實作對目標相關運動參數的估計,包括都卜勒調頻率、運動速度以及穿越基線時刻等,其中對於調頻率或者都卜勒歷程的搜尋是FSR系統目標參數估計最關鍵的問題之一。回波訊號的都卜勒頻移由目標在雙站構型中的運動產生,而在目標穿越前向散射區內的一小段時間內,往往可以認為目標的絕對速度是恒定的。與低斜視角的SAR成像技術相似,當忽略掉高階的距離變化參數後,可以近似地認為目標的都卜勒頻移在這段時間內滿足LFM形式,而其調頻率與目標速度以及整個雙站系統的構型參數有關。不過在LFM訊號上還調變著震蕩的目標RCS,所以難以使用傳統的解調頻或者DFrFT等整體分析方法實作對調頻率的搜尋,而只能借助STFT一類的分段時分頻析手段求得目標在前向散射區內不同時刻的頻率變化。圖5(a)展示了一段有實測空中目標穿越的時長約為1.2 s的回波訊號幅值歷程,相應的原始訊號已經過直流成分及高頻雜訊濾除處理;圖5(b)是該訊號段的實訊號STFT時分頻析結果,可以看到明顯的用黑色虛線標識的LFM特征。當獲知都卜勒調頻率之後,系統便可以結合雙站構型參數遍歷搜尋出目標的運動速度及目標穿越時刻等運動參數。
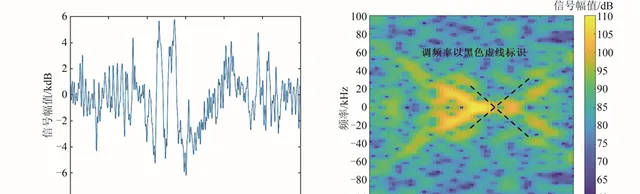
圖5 前向散射體制下的GNSS被動雷達遙感系統空中目標回波時分頻析結果
因為FSR系統不具備距離分辨能力,所以傳統的雷達成像技術無法直接套用在該類系統上,但在獲知回波訊號的都卜勒調頻率以及對應的都卜勒歷程之後,目標穿越基線時的輪廓可以被有效重建。在前向散射區內,目標的復散射訊號可以看作是與目標都卜勒有關的復數相位以及與目標形狀相關的時變繞射成分的疊加。
倘若將問題重新聚焦回GNSS FSR系統,由於雙基構型時刻發生變化,且其訊號到達功率通常較低導致都卜勒調頻率求解較為困難,所以SISAR成像在該類系統中的套用較少。在較為嚴格的構型限制下,有文獻提出了使用GNSS訊號作為放射線源的前向散射雷達的SISAR成像技術,借助目標穿越基線時產生的復散射訊號對接收機正上方1 km高度的民航客機的頂部輪廓進行了成功的描繪。但其研究亦指出該技術的套用受雙基構型和目標尺寸的限制。此外,有文獻提出了使用稀疏自動編碼器和BDS訊號的FSR系統目標辨識技術,直接在目標的SISAR成像結果上實作了目標分類,並使用仿真數據驗證了該項技術的可行性,為GNSS FSR系統的動目標辨識工作提供了與利用功率譜特征進行分類的不同思路。
3. 技術展望
1)後向散射探測體制下動目標遙感檢測技術展望
當前的後向散射探測體制下的幀間能量積累主要依賴非相幹積分來實作,但事實上因為雜訊的相位隨機性,使用相幹積分可以進一步削弱雜訊成分能量進而帶來更高的訊雜比增益。不論對於SISO構型下的幀間積累還是MISO構型下的多星數據融合,相幹積分都需要首先對不同幀的二維訊號進行參數配準,其中包括目標峰值在RD域中的位置以及峰值點的復數相位。目前,針對傳統雷達的MFD問題已有關於相幹性修復的技術提出。雖然在GNSS被動雷達遙感領域中還較少有相關成果,但事實上因為在討論透過多幀訊號融合實作訊雜比增強的語境中往往隱含著單幀數據並不具備目標可見性的前提,所以在幀間相幹積分技術上GNSS訊號和傳統雷達訊號並無本質差異,對此類問題嘗試適配主動雷達的相關解決方案依然不失為是實作突破的方向之一。
此外,積累同一顆可見衛星的多頻帶目標回波能量亦是實作相幹MFD的潛在解決方案。該方案的優勢也在於對於來自同一系統且同樣時間下的不同頻帶的回波數據幀,其中目標的運動特征必然完全一致,所以其回波能量積累過程無需對幀間的RD域峰值位置差異進行校正,相關演算法的開發可以更多關註復訊號的相幹性補償方法。
2)前向散射探測體制下動目標遙感檢測技術展望
當單一前向散射區內的回波訊號無法檢測到目標穿越時,是否可以透過結合多個前向散射區內的回波資訊對目標進行聯合檢測,是目前亟待解決的問題之一。雖然後向散射體制的構型要求更容易滿足,但FSR系統的高訊雜比特征在實際套用中更具優勢,所以如何利用多訊號源對目標進行聯合檢測是提升系統檢測效能的重點。不過該問題與後向散射體制的MFD問題大有區別,因為FSR系統中並沒有幀的概念,系統往往在一維時域對目標進行檢測。當前缺少有效的技術手段將目標穿過不同基線的能量變化累積起來以實作微弱能量波動的檢測,而倘若此問題得到有效解決,那麽MIMO雷達遙感系統的雙基基線組成的前向散射區網路將會實作非常高效的弱目標甚至隱身目標的檢測和跟蹤。
MIMO構型下FSR系統實作的另一主要難點是多台接收機的布站方案選擇。當前針對SIMO構型的分布式雷達遙感系統的布站方案已有部份相關成果,盡管主要局限於仿真驗證階段,但對未來的MIMO FSR系統的構築仍具有重要參考意義。
3)GNSS被動雷達遙感系統成像技術展望
目前,使用GNSS訊號作為外放射線源的雙站SAR系統的效能表現主要受限於接收機成像視角以及訊號固有的低分辨率限制,使得該類系統的成像結果一直和傳統的SAR影像品質有著較大差距。如何最佳化訊號的分辨率或提升訊號的有效頻寬,是改進該類系統成像品質的關鍵所在。
在對目標成像方面,依舊可以從兩種不同的散射體制出發進行考察。對於後向散射探測體制下的水面及地面動目標的成像,已有的部份研究成果對目標的運動方式要求都比較苛刻。因為地基接收機通常靜止,所以該類系統往往需要目標發生轉動或者沿著垂直視線方向發生運動才可以利用ISAR或SAR的能量聚焦邏輯實作成像。但雷達系統中的待檢測目標往往是非合作的,更具通用性的成像技術或許需要將接收機搭載到運動平台上以實作更理想的合成孔徑效果。對於空中動目標的成像工作,因為回波訊號的低訊雜比和可用訊號視窗較短的特征,所以通常只能依賴FSR系統的SISAR成像技術,而傳統的ISAR空中動目標成像演算法則不再可用。SISAR套用目前普遍局限於目標恰好從接收機正上方穿越系統的雙基基線這一特定場景,未來若能擴充套件到更多構型下並得到驗證,將為演算法提供更高的通用性。進一步地,倘若可以利用未來可能實作的MIMO FSR系統從多個角度對空中目標實作陰影尺寸提取,並重建目標的三維輪廓,將給出更可靠的目標分類結果。
結語
過去的30年裏,有賴於國內外學者的持續探索,GNSS外放射線源雷達遙感系統的效能不斷得到最佳化,但GNSS訊號固有的劣勢長久以來都是限制該類系統發展的瓶頸。但是,GNSS系統自身的優勢或許也是改進該類系統表現的突破口所在。譬如,諸多GNSS星座通常可以同時為雷達遙感系統提供具備十幾個甚至幾十個資訊完全已知的可見訊號源。如何將這些分散在空間中的訊號能量聚焦起來,無疑是該類系統在動目標檢測方向上最值得被解決的問題之一。隨著越來越多的學者開始嘗試突破這一難關,GNSS被動雷達遙感系統也正在朝著智慧化、多基地化以及前向後向散射協同化的方向穩步發展。
初審:張艷玲
復審:宋啟凡
終審:金 君
資訊











